2023年 11月18日、秋晴れの中、東京で箱庭合宿に参加してきましたので、そのお話をしたいと思います。
テーマ
今回の主要テーマ(公にできそうなものだけピックアップ)は、以下のものです。
- 大阪万博
- 出展内容の方向性の共有と次のステップに向けた検討会をしました
- 箱庭ドローン・シミュレータ
- 方向性(研究とビジネス両面)と開発状況を共有しました
- 箱庭のドキュメント
- ドキュメントの内容共有と今後の発展のさせ方について協議しました
今回のブログでは、大阪万博の検討内容についてお話ししたいと思います。
大阪万博
大阪万博の出展に向けて箱庭が描く未来社会の構想は、「リアルとバーチャルを融合する技術・箱庭」でご紹介しました。
現在、その内容をもう少し具体化して、実証実験すべき内容をまとめ始めています。
検討会では、実証実験で行う想定シナリオとして、バーチャル信号による通行制御がありますが、この具体化が必要という意見がありましたので、早速、シナリオを具体化させました。
ちなみに、そのシナリをDALL-Eにイメージ化してもらったものがこちらです。
次に、想定される箱庭の物理的なシステム構成の検討をしました。その結果がこちらです。
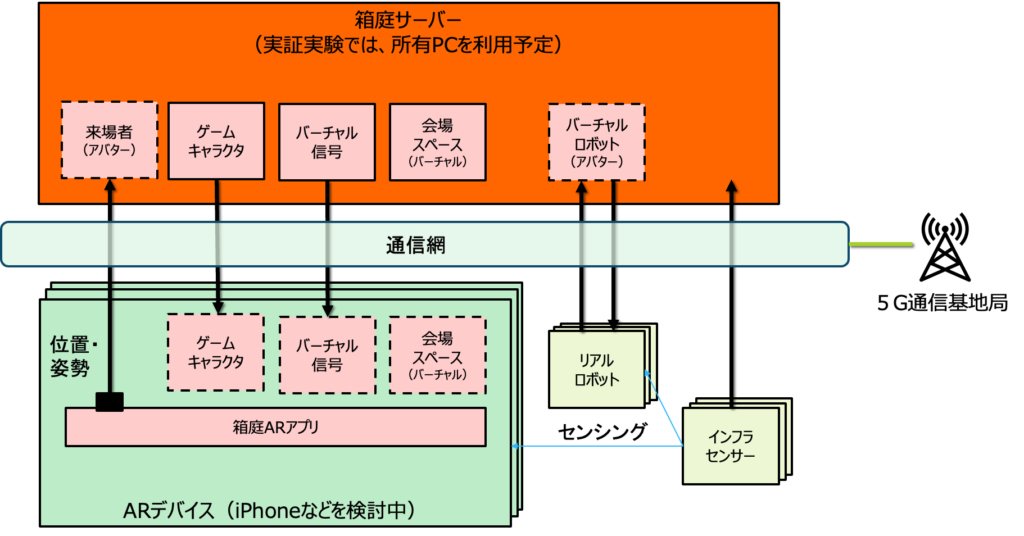
この構成では、大きく分けて4つの登場物と通信インフラ(5G環境)が描かれています。
- 箱庭サーバー
- 箱庭サーバー内には、箱庭環境一式がインストールされており、箱庭上で様々なアセットが動作します。
- ARデバイス(来場者が利用)
- ARデバイス内には、箱庭のARアプリがインストールされており、箱庭サーバー上のアセットと位置や姿勢などの情報を同期します。
- リアルロボット
- リアルロボットは、現実の空間で移動します。ただし、移動の指示は箱庭環境から送られてきます。
- インフラセンサー
- インフラセンサーは、現実の空間の物体の位置検出のために利用され、センシングデータは箱庭環境にアップされます。
そして、箱庭WG内の技術検討会の中で課題として上がったものは、リアルとバーチャル間の通信リアルタイム性/レイテンシーなどの懸念です。
今回のシステム構成では、出展会場の広さや来場者数に応じて、リアルロボットとARデバイスの数は増える想定です。
その場合、想定される通信網(5G)で、箱庭のシステムで発生する通信データ量や頻度がスケールするかどうかが最大の課題となります。
今後は、この課題に対して、TEQSさんの実証実験を通して調査・検討を繰り返していく予定です。
次に、箱庭上で動作させるゲームキャラクタをプロトタイピングした結果を共有しました。
ゲームキャラクタおよびその操作・アニメーション連動方法については、株式会社プラスプラス様の技術者の方々から、技術支援をいただき、たった1日で作成することできました(ご協力いただき誠にありがとうございました)。
こちらは、その成果です。ひとまず、キーボードでゲームキャラクタを操作できるようになりました。
今度は、ARデバイス上でこのゲームキャラクタと連動できるようにしようと思います。乞うご期待ください。
それでは、また次のブログでお会いしましょう。
コメントを残す