2024年1月26日(金)、「箱庭ドローン・シミュレータ」の最新アップデート版v1.1.0のリリースをお知らせいたします。
最新のアップデートの詳細は、GitHubでご確認いただけます:hakoniwa-px4sim
新たなアップデートでは、以下の機能が追加され、多くの改善が行われています:
- 障害物との衝突時の物理的反応のリアルタイムシミュレーション:Unity上でドローンが障害物と衝突した時、その情報を物理モデル側にリアルタイムにフィードバックし、演算結果をUnity上で再現することが可能になりました。これにより、よりリアルなシミュレーション環境を提供します。[詳細はこちら]
- UnityおよびPX4を利用せずにPID制御の試行機能:ヘッドレス・シミュレーション機能をサポート開始しました。UnityやPX4を使用せず、ドローンの物理ダイナミクス単体での制御試作が可能になります。[詳細はこちら]
- Unityドローンモデルのアップデート:ドローンモデルをアップデートしました。箱庭ドローンモデルH1 のUnityアセットは、中村歩高さんより提供いただいたデータを基に作成しています。箱庭へのOSS貢献に深く感謝いたします。[詳細はこちら]
- Unreal Engine用の新プラグイン:Unreal Engineユーザーへの対応として、箱庭のUnreal Engineプラグインを開発し、プロトタイプ版を公開しました。これにより、Unreal Engineユーザーも箱庭ドローン・シミュレータの高度な機能を活用できるようになります。[詳細はこちら]
障害物との衝突時の物理的反応のリアルタイムシミュレーション
箱庭上のドローンが障害物と衝突すると反動で跳ね返るようになりました。
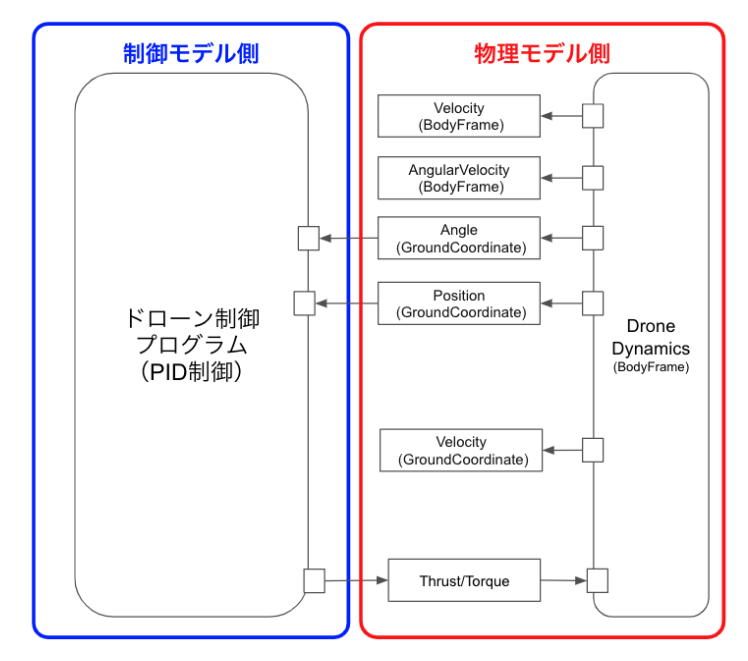
UnityおよびPX4を利用せずにPID制御の試行機能
ドローンの物理モデルに対して、C言語で作成したPID制御プログラムで直接制御することができるようになりました。PX4との連携前の事前確認や自動テストによる品質確認用に役立つと思います。
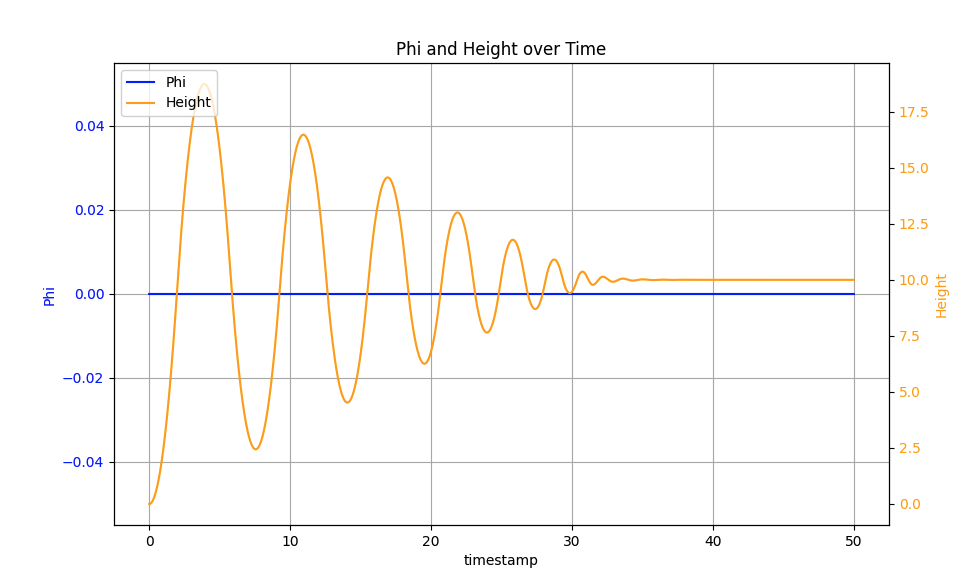
この例では、ホバリング制御プログラムを3秒間実行した結果です。シミュレーション時間としては、50秒間の結果がグラフ表示されます(下図)。
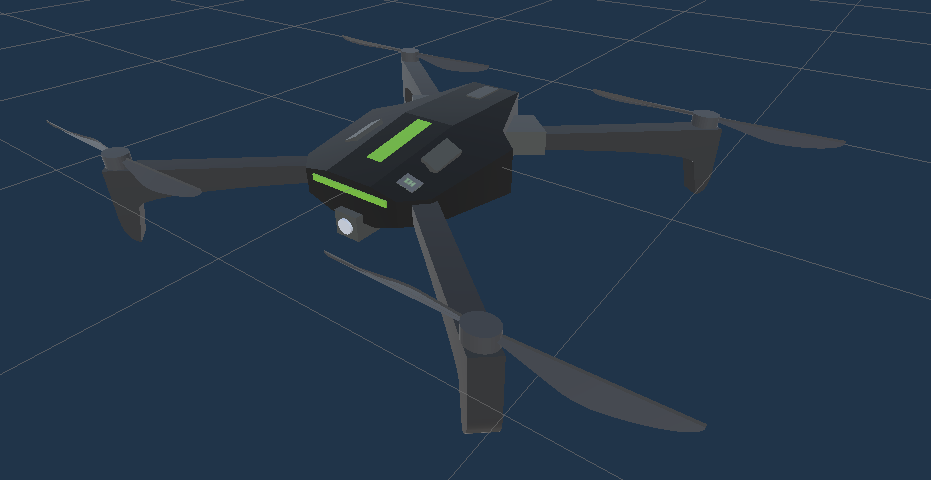
Unityドローンモデルのアップデート
Ida B. Wells-Barnett High Schoolに在学中の中村歩高さんから、箱庭プロジェクトへUnityドローンモデルをご提供いただきました!早速、箱庭ドローンシミュレータに組み込みさせていただきました。型番はHodakaさんのHをいただき、H1号機です(機体に型番を埋め込みました)。
Unreal Engine用の新プラグイン
Unreal Engineで作成されたゲームアプリケーションを 箱庭プラグイン に接続することで、箱庭シミュレーション環境上で連携動作できるようになりました。プロトタイプ版として、箱庭ドローンシミュレータと接続し動作することを確認できました。

今後の予定
箱庭ドローンシミュレータの今後の機能拡張として、MATLAB/Simulinkの対応を予定しております。乞うご期待ください!
合同会社 箱庭ラボ 担当:森崇
コメントを残す