箱庭ラボが現在開発に全集中している箱庭ドローンシミュレータは1stリリースが終わり、2ndリリースに向けて鋭意開発を継続しています。そんな中、熟練Unityエンジニアである小森 顕博さんとディスカッションする機会をいただきましたので、今回は、小森さんの幅広いご知見の中で、箱庭ドローンシミュレータがどのように見えるかご紹介したいと思います。
小森顕博さんのご経歴:
小森さんは、ソニー株式会社のR&D部門やクウジット株式会社でのエンジニア経験を持ち、ユニティ・テクノロジーズ・ジャパンでプロジェクトマネージャーとして活躍された後、2023年にはご自身の株式会社小森研究所を設立されました。ロボティクスをはじめとする産業分野において専門的な知見をお持ちで、Unityの使用歴は10年以上に及ぶ熟練技術者です。
レッツ・ディスカッション
箱庭ドローシミュレータは従来のシミュレータにはない特徴を検討して実装しています。ただ、Gazeboなどのシミュレータとの差別化であったり、箱庭としての魅力がどれほどありそうか気になっていましたので、そのポイントを素直に相談させてください!とお願いしました。
補足:Gazeboは、ROSをベースとしたロボット工学の研究や開発に使われるシミュレーションソフトウェアです。
全体を通して、小森さんからは箱庭の良さや可能性をすごく感じとって頂き様々なアドバイスやお褒めの言葉をいただきました。そして、ディスカッション内容は多岐に渡りました。なるべく全体像が見やすくなるように一枚絵にしてみましたので、まずはこの絵をみてください。

大きく分けると8つの視点でアドバイスを頂けたと思いますので、それぞれ解説していきたいと思います。なお、図上で赤文字になっているところは、今回のディスカッションで新たな気づきポイントだったところです。
Visualize
箱庭ドローンシミュレータの特徴の一つでエンジンの柔軟性があります。箱庭は、現時点でUnityのサポートをしていますが、他のゲームエンジンも設計上は対応できる構造になっています。なので、Unreal Engineへの対応があるとラインナップが増えてかっこいーとおっしゃっていただけました。(ちなみに、今回のディスカッションを受けて、早速、Unreal Engine対応箱庭のプロトタイプ版を作成しました。)
さらに、話は進み、ビジュアライズとしてWebブラウザでやるという案が出てきました。Webブラウザは、gRPC通信だけでなく、Zenohのような先進的な通信技術へのサポートが進んでいます。特にZenohは業界で注目されている技術なので、箱庭として Zenoh対応のモチベーションが高まりました。いずれにせよ、Webブラウザで箱庭のシミュレーションができるのであれば、より広く箱庭を利用いただく機会が増えますから、どこかでスパイクしたいと思います!
補足:
- gRPCはGoogleによって開発された高性能なリモートプロシージャコールシステムです。gRPC通信により、異なるシステム間でデータを効率的に交換することができます。
- Zenohは通信とデータ管理のためのプロトコルです。異なるデバイスやアプリケーション間でデータを共有し合うための最先端の技術です。
Map & Transportation
箱庭は、Unityのサポートをしていますので、PlateauやEsriがオープンデータとして提供している 3D都市モデルを箱庭上で利用できるというメリットが大いにあることを教えていただきました。先日、私のQiita記事で、ニューヨーク上空でドローンを飛ばしてみましたが、これが日本国内も含めて地球上の様々な都市でドローンを飛ばすことができるということなのです!
さらに、これは単なる景観的な楽しみだけではなく、人口減少に伴う社会課題に対応するドローン物流サービスにも役立つことがわかりました。Zipline社は、ドローンを使って医薬品配送を時速100kmの最高速度で飛行して輸送しているそうです。今後、国内でも同様なサービスが普及すると思われますが、事前検証はとても大切です。ですので、現実の輸送経路をベースにしたドローン輸送のテストの必要性が高まると思いますし、そのニーズに対して、箱庭ドローンシミュレータは良いポジションになると思いました。箱庭にUnityなどが提供している3D都市データを組み込んで、手軽に事前検証できたら素敵ですよね。
DroneSensorModel & Visualized Evaluation
箱庭ドローンシミュレータは、センサモデルの整備 をしています(下図)。各センサは仕様を明確化しており、仕様に基づいた実装をしています。また、これらのセンサモデルは差し替え可能な構造になっています。ですので、ベンダー固有のセンサ(IMUなど)に差し替えた評価も可能になります。例えば、より精度が高いセンサモデルに差し替えて評価することで、数値だけでなく視覚的にもセンサの良さを伝えることができます。つまり、ドローンのセンサを提供する企業にとっては良い宣伝ツールとしても利用できるというわけです!
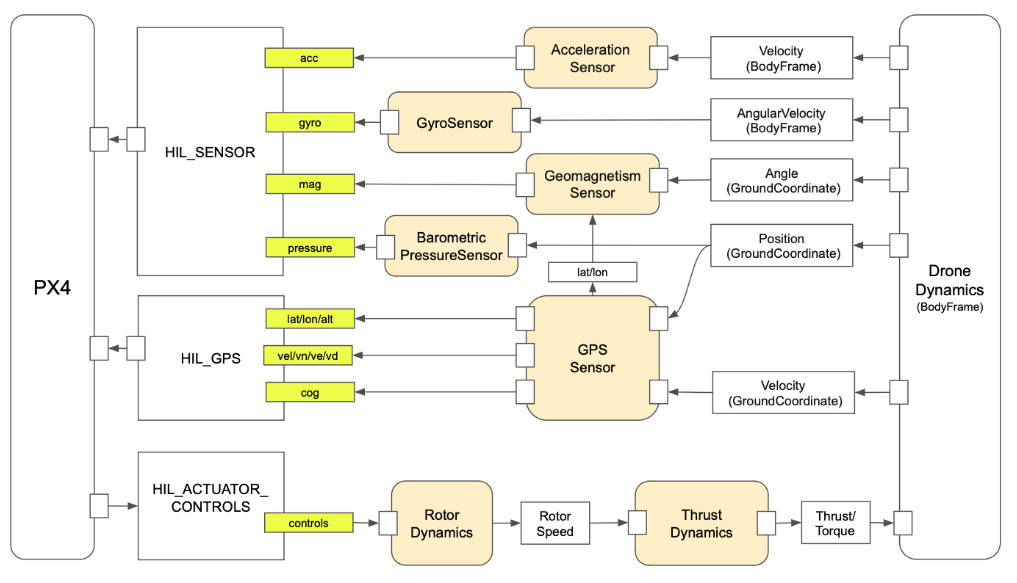
この点についてご意見をいただいたところ、とっても話が盛り上がりました!
Control Evaluation
まず、最初に話が上がったのは、LiDARやCameraのようなセンサです。先ほど3D都市データを利用するという話と絡みますが、まさに、これらのセンサは実際の現場のデータを使った評価が重要となります。箱庭であれば、UnityのLiDARやCameraセンサの実装は容易ですし、3D都市データをインポートして現実に近い形での評価環境として利用することができます。現実に近いセンサデータ生成器として箱庭を利用することができますから、センサフュージョンのような制御の分野では、箱庭は重要な役割をするはずとアドバイスをいただけました。
補足:
- LiDAR(ライダー、Light Detection and Rangingの略)は、光を用いて距離を測定する技術です。
- センサフュージョンは複数のセンサデータを統合して使用する技術です。複数のセンサーからのデータを組み合わせてより正確な情報を得ることができます。
External Disturbance & Durability Test
そして、最も印象的だったものが、評価の見せ方として、東京ドーム一個分の作業をやってみせるというものです!

「センサモデルの評価をビジュアルとして見せる場合、性能差を見せにくいケースもありますよね?」
と質問したところ、
「たとえば、耐久テストをシミュレータ上でやって見せるやり方があります。」
「温度ドリフトやマルチパスの影響がある中で、ドローンに作業をさせ続けた場合、通常のセンサを採用した場合は1時間かかるけど、高精度なセンサを利用すると30分で終わるとしたら、とってもわかりやすいですよね。」
正直、このお答えには脱帽と言いますが、小森さんの見識の深さを感じました。そして、この評価の仕組みはぜひとも箱庭に組み込んで行きたいと思いました(箱庭の野望はどんどん膨らんで行きます)。
補足:
- 温度ドリフト(Temperature Drift):温度ドリフトは、電子機器やセンサーの性能が周囲の温度変化によって影響を受ける現象を指します。具体的には、温度が変わると、センサーや回路の材料が膨張または収縮し、それにより測定値が変動することがあります。
- マルチパス(Multipath):無線信号が反射や回折によって複数の経路を経て受信機に到達する現象です。この結果、同じ信号が異なる時間に受信機に届くことになり、信号の強度や品質に影響を与えることがあります。
最後に
今回のディスカッションはとっても楽しくワクワクするものでした。これからの箱庭ドローンシミュレータの機能拡張の方向性に大きな影響を与えると思います。今後も箱庭ラボは様々な方々のご意見をいただきなら、より野心的で楽しい箱庭シミュレーション環境を作っていきたいと思っています。これからの展開にぜひご期待ください。
最後に、貴重な時間を割いてくださり、幅広い範囲で深い洞察とアドバイスをいただきました小森顕博さんに心から感謝申し上げます。今後も小森さん(株式会社小森研究所)とはビジネス面でも協力させていただきたいと思っております。どうぞよろしくお願いいたします。
コメントを残す