2024年3月10日(日)、春の日差しの中、浅草駅を降りて徒歩10分、東京都立貿易センター台東館へ行ってまいりました。昨年秋のROSCon JP 2023 以来、約半年ぶりの浅草入りです。
OSC2024 Tokyo/Spring のTOPPERSプロジェクトの出展参加です!今回はその内容をご紹介したいと思います。
出展ブース
今回の出展は以下の2点でした。
- 箱庭シミュレーション環境を使った車載ソフトウェアのリスキリング教材(左)
- 箱庭ドローンシミュレータ(右)
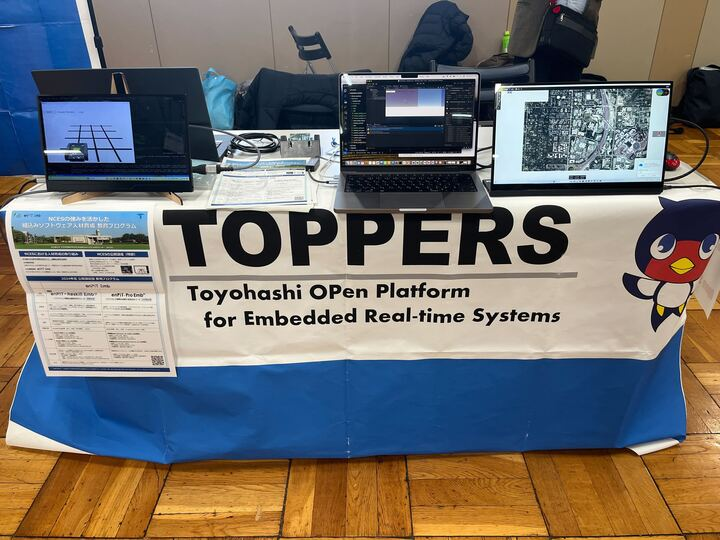
今回の目玉であるリスキリング教材は、合同会社箱庭ラボがシミュレータ開発のお手伝いをさせていただきましたので、その内容を重点的にお話ししたいと思います。
リスキリング教材としての箱庭シミュレーションのデモ
論よりRUN!
ブースの前面に、Arduino用Zumo ロボットがライントレースしながら移動しているのが見えますか。
ロボットは、コース上の黒いラインをreflectance sensor arrayで読み取り、左右移動しながら目的地に向かって走行しています。
そして、ブースのディスプレイ上に箱庭シミュレーションが見えます(下図:拡大版)。
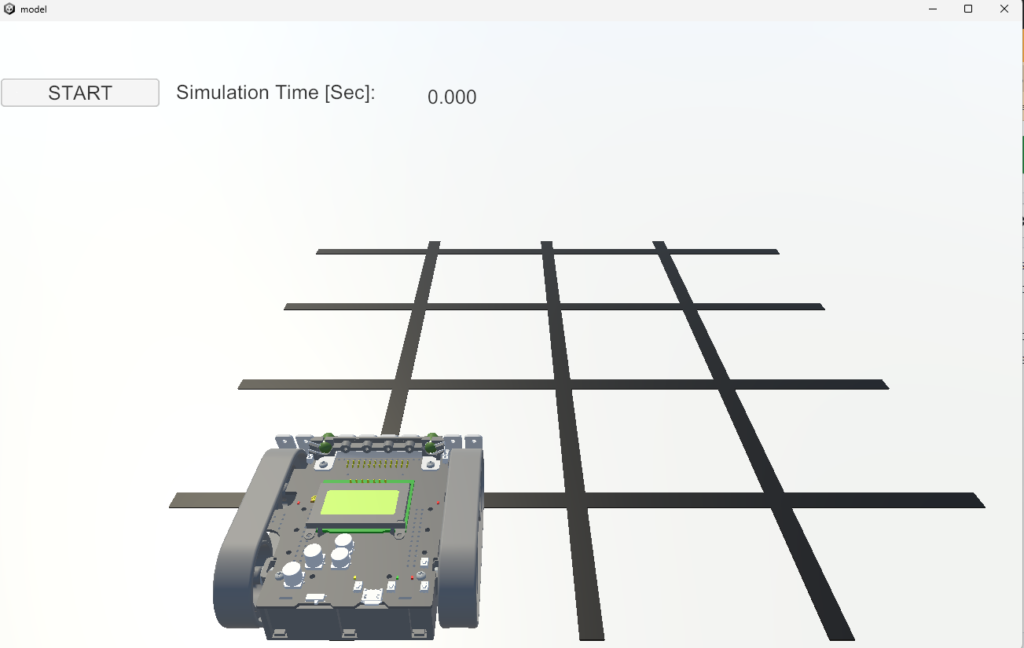
作りは、Zumoロボットの3Dモデルをベースにして、箱庭シミュレータに組み込み、Unity上でシミュレーション再現しています。reflectance sensor arrayもUnityのカメラを利用してバッチリ再現できています。
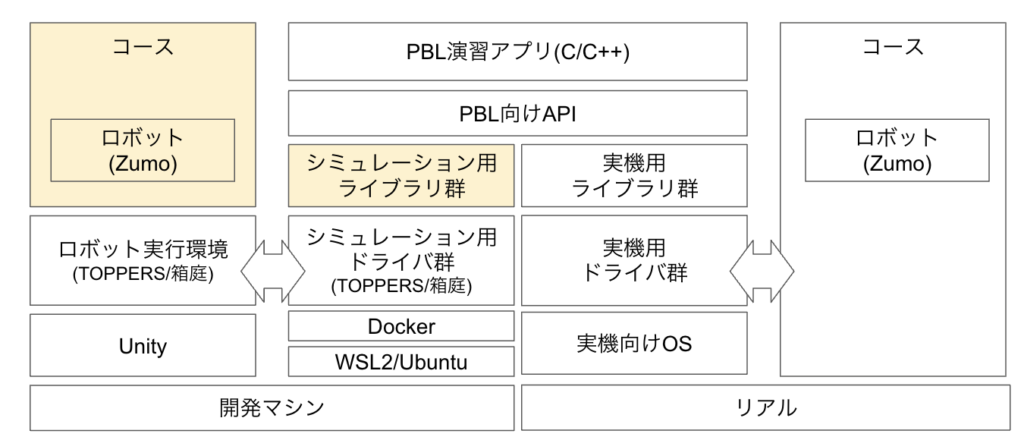
本物のZumoロボットは、Arduino上のプログラム(C/C++言語)で制御します。
一方、箱庭シミュレータは、ArduinoのAPIを箱庭ランタイム側で再現しています。
この構成により、制御プログラムは、本物のArudinoでもシミュレータでも同一のものであるところが、とっても大事なポイントです(下図のようなイメージです)。
シミュレータを利用するメリット
さて、ここでシミュレータを利用するメリットについて、簡単に俯瞰してみたいと思います(下図)。
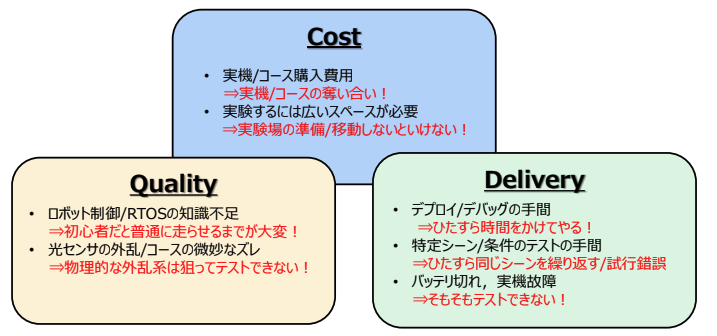
補足:2021年度 ETロボコン向け TOPPERS活用セミナーで紹介した資料の抜粋で、競技者のインタビューを通して、QCDの視点でにまとめたものです。
Cost
• 実機/コース購入費用
⇒実機/コースの奪い合い!
• 実験するには広いスペースが必要
⇒実験場の準備/移動しないといけない!
Quality
• ロボット制御/RTOSの知識不足
⇒初心者だと普通に走らせるまでが大変!
• 光センサの外乱/コースの微妙なズレ
⇒物理的な外乱系は狙ってテストできない!
Delivery
• デプロイ/デバッグの手間
⇒ひたすら時間をかけてやる!
• 特定シーン/条件のテストの手間
⇒ひたすら同じシーンを繰り返す/試行錯誤
• バッテリ切れ,実機故障
⇒そもそもテストできない!
ロボット開発をされておられる方でしたら、このようなご経験をされたことはないでしょうか。
こういった課題に対して、シミュレータを利用することで、いつでもどこでも手軽に開発を進めることができると思いますし、リスキリング教材でこのようなメリットを享受できるところはとても素晴らしいと思います。
最後に
今回開発させて頂いたリスキリング教材向けのシミュレータでは、ETロボコン向けに箱庭WGで開発した単体ロボットシミュレータの実績・ノウハウが大いに役立っております。今回の舞台で日の目を見ることができたことは、大変感慨深いです。
箱庭ラボでは、今回のようなシミュレータを教材としてご利用いただけるように開発サポートいたします。もしご要望ありましたら、ぜひお問合せください!
コメントを残す