2024年2月13日(火)、「箱庭ドローン・シミュレータ」のMATLAB®およびSimulink®対応版v2.0.0のリリースをお知らせいたします。
最新のアップデートの詳細は、GitHubでご確認いただけます:hakoniwa-px4sim
本バージョンの最大の特長は、MATLABおよびSimulinkで作成されたドローンの物理モデルを箱庭(Hakoniwa)上でシミュレーションできるようになった点です。この機能により、ユーザーはMATLABおよびSimulinkで検討中のプラントモデルを箱庭のシミュレーション環境で直接テストできるようになります。特に、PX4連携やゲームエンジンによるビジュアライズ、自動テストを含む、箱庭が提供する幅広い機能を利用して、プラントモデルの検証を様々な角度から行うことが可能です。
MATLABおよびSimulinkのテンプレート並びに解説ドキュメントにつきましては、MathWorks社の三浦功也氏より貴重なコントリビューションを頂きました。箱庭プロジェクトのソフトウェアプラットフォーム開発へのご支援に、心より感謝申し上げます。
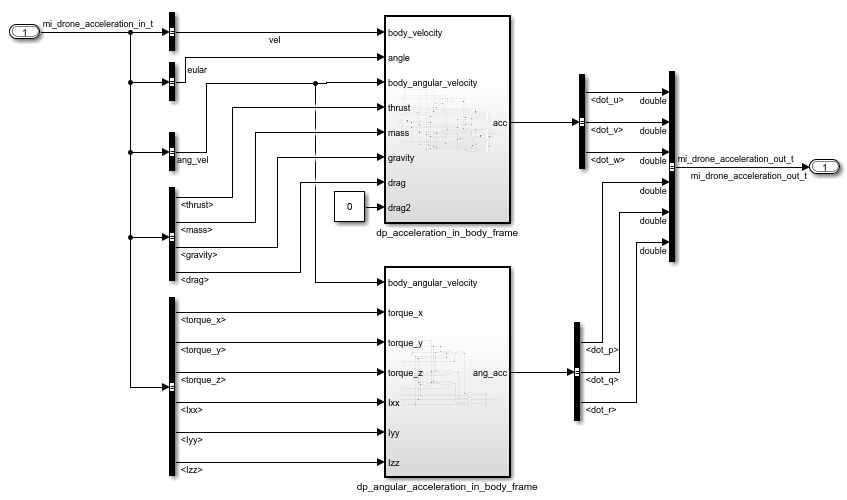
図1: MATLAB®およびSimulink®で実装された箱庭ドローン・シミュレータの物理モデル(参照)
合同会社 箱庭ラボ 担当:森崇
コメントを残す