箱庭ラボが設立されて約3ヶ月が経ちました。
設立当初に描いたビジョンが、今どのような形として見えているのか、少しお話ししたいと思います。
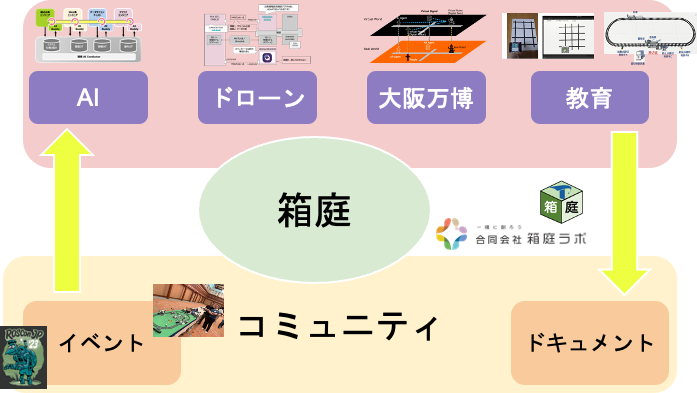
箱庭が目指す姿と3ヶ月間のあゆみ
箱庭が目指す姿は、以下の流れが自然と出来上がって、箱庭というシーズが成長して行くことです。
- オープンソース・コミュニティからビジネスニーズの流れ
- ビジネスニーズからオープンソース・コミュニティへの流れ

そして、3ヶ月が過ぎて、当初のビジョンを振り返りながら、俯瞰して現時点の成果を当てはめてみるとこのような形だと思います。
オープンソース・コミュニティ
箱庭ラボが設立されて、最初の2ヶ月間は、ほぼイベントの準備に明け暮れていました。
この活動の中で、箱庭ラボが協力・応援させていただいたものは以下のとおりです。
- 8月:SWEST25
- 9月:ROSConJP 2023
- 10月:
- 第67回宇宙科学技術連合講演会(応援参加):資料はこちら
- ROSCon 2023(世界デビュー):資料はこちら
これらのイベント参加を通して、箱庭を様々な方々に知っていただけたと思いますし、これからの箱庭への期待感もすごく感じとることができました。
なお、年内のイベント予定は、以下になります。乞うご期待ください!
- 11月:
- 11/16 EdgeTech+2023: TOPPERSブースで箱庭紹介予定
- シミュレーションハブ箱庭が切り拓く技術融合の未来
- 11/29 第5回 AI/IoTシステム安全性シンポジウム
- 複数ロボットシミュレーション環境・箱庭 STAMP/STPAでの活用
- 11/16 EdgeTech+2023: TOPPERSブースで箱庭紹介予定
- 12月:
- 12/16 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023)
- 箱庭技術へのmROS~2通信機能の統合によるリアルとバーチャルの融合体験を実現するシステムアーキテクチャの検討
- 12/16 第24回計測自動制御学会システムインテグレーション部門講演会 (SI2023)
箱庭ラボのミッションの一つとして、ドキュメントの整理があります。
実は、今週、思い立って、ドキュメントを書き始めました。
箱庭の一般ユーザ向けのドキュメントで、箱庭のアーキテクチャ中心に共通部となる情報を整理・集約化していきたいと考えています。
- システムアーキテクチャ – 箱庭の基盤となるアーキテクチャの概要を示します。
- インストールガイド – 箱庭を始めるために必要なインストール手順を詳細に解説します。
- 利用方法 – 箱庭を効果的に利用するための基本的なガイドラインを提供します。
- トラブルシューティング – 頻出する問題とその解決方法について説明します。
ビジネス・ニーズ
箱庭の夢の一つは、「大阪万博への出展」です。
この夢に向けて、箱庭では未来のロボットサービスのアーキテクチャの検討し、リアルとバーチャルの融合体験を通した未来の世界感を大阪万博でお見せしようと画策しています。
大阪万博出展に向けた具体的な取り組みとして、ソフト産業プラザTEQSさんと相談させていただきながら、出展の方向性について検討を進めている段階です。まだ、出展が確定しているわけではありませんが、年末から来年初冬に向けて、箱庭WGメンバと一緒に活動を加速させて行く予定です。
箱庭ラボの最初のビジネス案件は、「学生・社会人向けのPBL演習教材として箱庭シミュレータの提供」でした。
オープンソースとしてフリーで利用できる箱庭シミュレータは数多くありますが、教育向けに正式採用される事例として、本案件はとても有意義なものです。現時点で、開発はほぼ終了しており、来年から本格的にご利用いただく予定でおります。

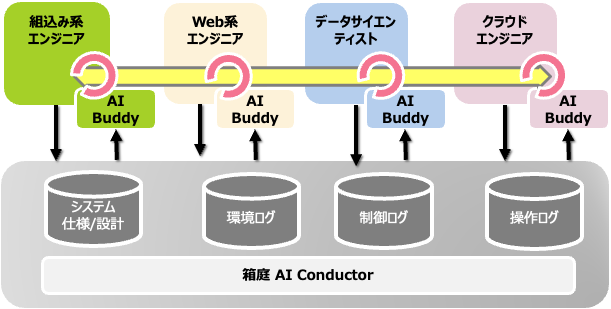
箱庭では、AIの活用も視野に入れています。
箱庭AIバディの構想とトライアルを、本ブログで2回に分けて紹介させていただきました。
箱庭はコミュニケーションプラットフォームとして、AI活用を模索しております。年内はまだあまり成果を出せる状況にはありませんが、来年以降で少しずつ取り組みを加速できればと考えています。
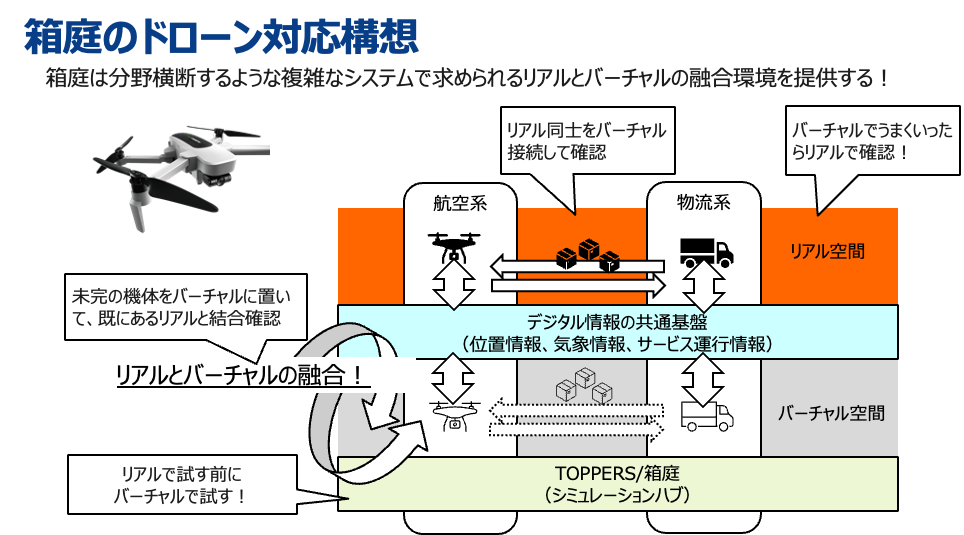
箱庭はシミュレーションハブであり、そのビジネス的な出口として最有力なものが箱庭のドローン対応構想です。
ドローンのシミュレータは数多くあると思いますが、そのほとんどはドローン制御に特化したものだと思われます。一方で、ドローンは物流的な側面もありますが、物流系と連携できるシミュレーション環境はあまりないと考えています。
箱庭はシミュレーションハブという構想を打ち出しており、様々なシミュレータをつなげることができるところが強みの1つです。たとえば、ドローンが荷物を運んでロボットに渡したり、逆に受け取ったりといった連携シミュレーションが可能になります。
現在、箱庭ラボでは、ドローンシミュレータ対応に集中しており、数多くの試行錯誤を繰り返しています(箱庭ラボの開発風景で紹介しています)。
年内までに、PX4と箱庭を連携したシミュレーション環境の実現を目指したいと考えています。
箱庭ラボのビジョン
箱庭ラボのビジョンは、「箱庭という自由な空間に入り、人と人が境界を越えて繋がり、人間の創造性が新しい世界を描き出す」です。
自分が箱庭のオープンソース活動を続けてきた原動力は、「純粋に技術者として箱庭を作りたい!」というワクワク感からきています。
3ヶ月間の箱庭ラボの活動を通して、様々なイベントや打ち合わせ等に参加させていただきましたが、このワクワク感は色んな方々に伝わっていたんだなーっと実感しました。
たとえば、ROSConJP2023のイベントで箱庭の説明をしているとですね、「実はTwitterでフォローしてます。いつも楽しそうに箱庭開発してますよねー。」っと声をかけてもらえたりしました。とっても嬉しい体験でした。
また、とある打ち合わせの場にお邪魔した時には、「箱庭のシミュレーションハブの構想はなんでも繋がるようになるからすごく面白い。夢が広がる。何か箱庭をベースにしたものを作りたい!」と熱く語られる方が現れたり。いやー、まことにありがたいことです。
このような想いが繋がり、新しい世界が描き出せるように、これからも箱庭ラボの活動を継続していきたいと思います。乞うご期待ください!!
コメントを残す