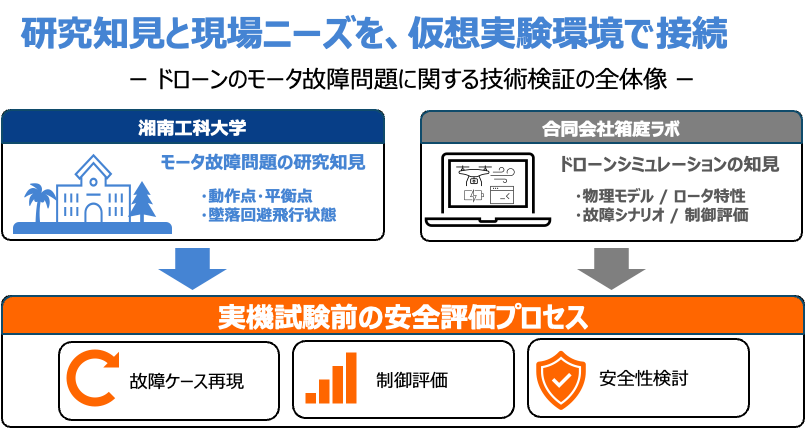
合同会社箱庭ラボは、湘南工科大学における「飛行形ドローンのモータ故障問題」に関する研究知見を踏まえ、ドローンの故障ケースをシミュレーション上で安全かつ再現可能に検証するための仮想実験環境について、技術検証を開始しました。
ドローンの社会実装が進む中で、飛行中のモータ故障、制御異常、外乱などに対する安全性評価は重要性を増しています。一方で、実機を用いた故障試験には、安全面、コスト面、再現性の面で大きな課題があります。特に、モータ完全故障のような異常状態は、実環境で意図的に再現することが難しく、実機試験前にリスクを洗い出すための仮想実験環境が求められています。
本取り組みでは、湘南工科大学におけるモータ故障問題に関する研究知見、箱庭ラボが開発する分散シミュレーション基盤「箱庭」および「箱庭ドローンPRO」を組み合わせ、実機検証前に故障ケースを安全に評価できるプロセスの構築を目指します。
合同会社箱庭ラボは今後も、「現実の前に、失敗できる世界をつくる」をコンセプトに、物理シミュレーション、制御、組込みソフトウェアを接続する分散シミュレーション基盤「箱庭」を通じて、ドローン開発・運用における安全性向上と検証効率化に貢献してまいります。
詳細は、以下のプレスリリースをご覧ください。
PR TIMES:
https://prtimes.jp/main/html/rd/p/000000004.000160692.html
湘南工科大学 お知らせ:
https://www.shonan-it.ac.jp/topics/20260616_01/
合同会社 箱庭ラボ
担当:森崇
コメントを残す