箱庭ラボのブログシリーズ「箱庭WGのコアメンバー紹介」、今回は細合晋太郎さんをご紹介します。細合さんは、箱庭プロジェクトのアーキテクチャ設計やROS 2関連のメンテナンスを担当されています。その豊富な経験と情熱に迫ります。
細合さんのご経歴紹介

細合さんは、北陸先端科学技術大学院大学で博士課程を修了し、組込みシステム向けのモデル駆動開発に関する研究を行いました。その後、九州大学で大学間の連携教育プロジェクトenPiT 組込みシステム分野にて教育や教材開発を担当しました。
次に、株式会社チェンジビジョンでUMLツールastahの開発やモデリングに関するコンサルティングを行い、東京大学の研究員として5Gネットワークにおける通信ミドルウェアの研究に従事しました。現在は、ものつくり大学 情報メカトロニクス学科の講師として、ロボットやデジタルツインに関する研究を行っています。
趣味はスキューバダイビングで、海中の非日常の世界で浮遊感や魚との出会いを楽しんでいます。
技術者としての原点(根っこ)
細合さんの技術者としての根っこは、小学生時代にまでさかのぼります。電子工作に夢中になり、「ものを動かすのが楽しい!」という思いが成長し、高校時代にはマイコンのデータシートを読みながらアセンブラ言語でプログラミングするまでに至りました(すごい!)。
言語習得とモデリングへの道
細合さんは、様々なプログラミング言語(アセンブラ、C/C++、Rust、Elixir、Python、Java、Kotlin …)に精通しています。その原動力は、「新しい技術を探求する喜び」だと思います。細合さんは常に新しい技術を呼吸するかのように学び、それを実際に使ってみることで、身につけてきました。おそらく、そうした自然な学びが細合さんの素晴らしいスキルとして現れているのだと感じます。
組み込みシステムの開発を進める中で、細合さんは新たな目覚めがありました。それが、モデリングです。組込みシステムは、多くの情報を扱います。デバイス、データシート、回路図、プログラム、CPUアーキテクチャなど、様々な要素を理解しつつ、ものづくりを進める必要があります。
これらの情報を一元的に俯瞰し、設計や実装を効率的に行うためには、組み込みシステム開発向けのメタモデルが必要だと感じたのです。メタモデルとは、具体的なモデルを定義するための抽象的なモデルであり、情報を統一的に表現し、システム全体の設計と管理を容易にします。細合さんは、この概念を取り入れ、組込みシステムに関わる情報をメタモデル化することで、開発プロセスの効率化と精度向上を目指しました。
博士課程では、この分野における先駆的な研究を行い、組込みシステムに関わる情報をメタモデル化し、DSL(ドメイン固有言語)を作成しました。これにより、開発者は複雑な情報を統一的に扱うことができ、設計の整合性を保ちながら効率的にシステムを開発できるようになります。細合さんのこうした取り組みは、組込みシステム開発の効率化と品質向上に大きく寄与できたと自負されています。
キャリアの転機と多彩な経験
細合さんは、様々な職場を転々としてきました。その理由として、任期制のプロジェクトや自身の成長を求めて新しい環境を探してきたことが挙げられます。例えば、enPiTプロジェクト終了後、チェンジビジョンでのコンサルティング活動や東京大学での5Gネットワーク研究を通じて、常に新しい挑戦を続けてきました。
また、ソフトとハードのバランスの取り方も気にされていたようです。仕事でソフトウェアが主の時は趣味でハードを扱い、教材開発などハード寄りの時はソフトのOSSに関わるなどしてどちらかに偏り過ぎないように注意されていました。
このようなチャレンジを続けることができたのは、組み込みだけでなくモデリング技術者としても技術研鑽を続けてきたからこそだと感じます。細合さんの多彩なキャリアは、幅広い技術領域での経験を積み重ね、常に新しい知識とスキルを取り入れる姿勢が支えています。
これからチャレンジしたいこと
現在、細合さんはものつくり大学でデジタルツインに関する研究を構想しています。屋内のロボットと人の協調を目指し、研究室自体をデジタルツイン化して、仮想空間での情報交換(座標情報、内部状態、温度、センサデータ)を通じて、現実と仮想の融合を目指しています。最近は研究室にある複数のロボットを箱庭に取り込んで動かそうとしているそうです。
ものつくり大学では、ソフトだけでなくメカ系も強みとしています。ロボットやセンサを作ることも可能で、3D CADデータを使ってレーザーカッターで金属加工を行ったり、サーボモーターを組み付けてアームロボットを簡単に作ることができます。こうした環境での研究は、細合さんにとって新たなチャレンジであり、大きな可能性を秘めています。
研究室の風景:

細合さんとの出会いと箱庭
細合さんが株式会社チェンジビジョンに在籍されていた当時、自分は同じフロアで、マイコンシミュレータ Athrill をプライベートで開発していました。TOPPERSコンテストでAthrillが金賞を受賞した情報が細合さんの情報ネットワークに引っかかり、高瀬先生を通じて、細合さんと出会うことになりました(まさか同じフロアにこんな逸材がいるとは思いもしませんでした)。
それから、細合さんとは定期的に技術交流を続け、CPUエミュレーションの仕組みやメモリ管理方法など、かなり濃い技術話で盛り上がっていたことを記憶しています。
そして、2019年に箱庭WGが結成され、細合さんも一緒に箱庭を開発していく仲間になりました。この出会いが、細合さんの豊富な知識と経験を箱庭プロジェクトに取り入れるきっかけとなり、プロジェクトの発展に大きく寄与しています。特に、箱庭のコア技術を設計していくときには、ユースケースや実現技術などについて、飲みながらディスカッションして理解を深めていったことを思い出します。
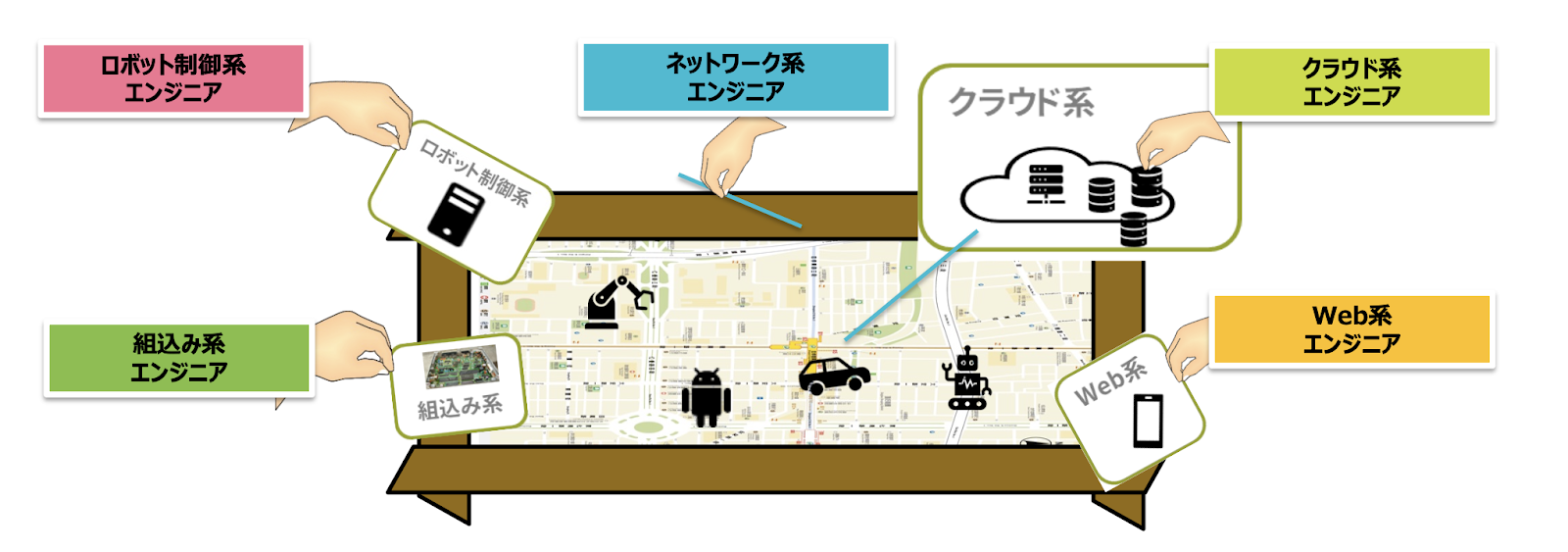
当時、箱庭は「様々なエンジニアが一緒に開発できる開発環境!」というコンセプトを固めていました。
そんな中で、細合さんからは「箱庭は様々な仮想化レベルのシミュレーションを選択できて手軽に試せる環境にしたい!」というアイディアが出されました。当時は、どうやって実現するのかが先に立ち、なかなか飲み込めませんでしたが、このアイディアは今でも箱庭アーキテクチャの中に生きています(下図)。
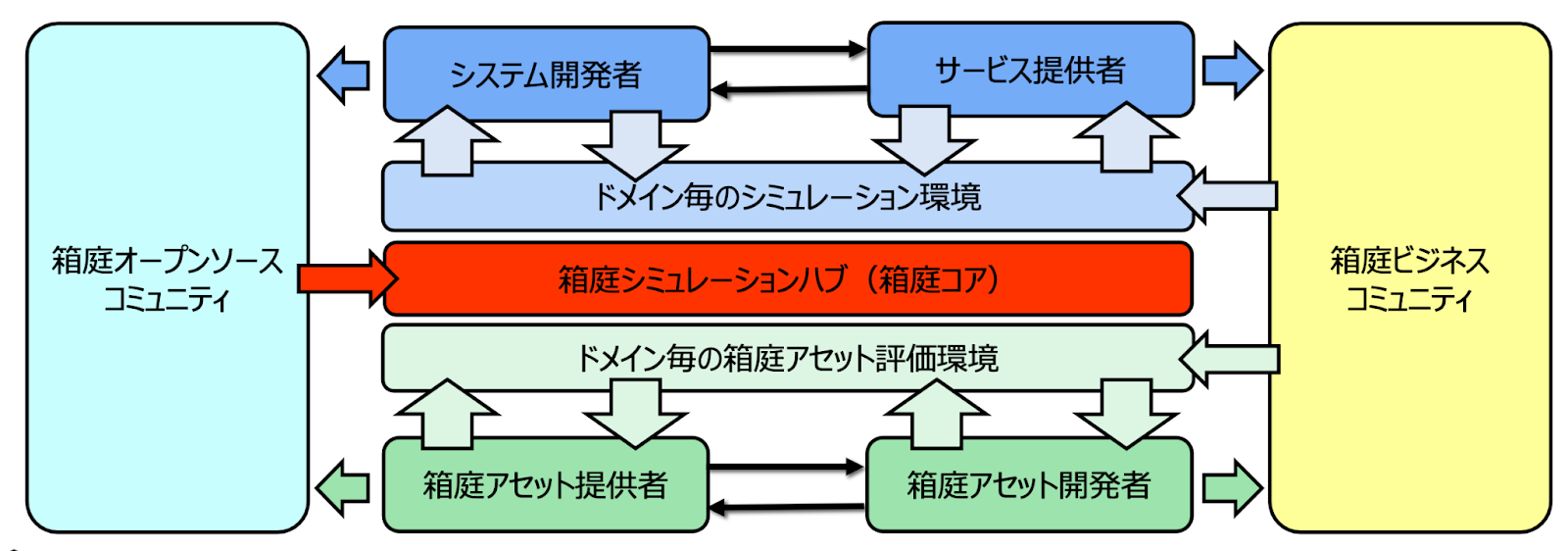
箱庭はシミュレーションハブ(箱庭コア)であり、上位レイヤはサービス向けのシミュレーション・開発ができます。一方で、下位レイヤはよりハードに近い層のシミュレーション・開発ができる構想です。このアーキテクチャの原点は、細合さんとのディスカッションのおかげだと思っています。
箱庭への期待と夢
細合さんは、箱庭を汎用シミュレータやデジタルツインのデファクトスタンダードに育てたいと考えています。現状では、新しいデバイスやロボットをシミュレーション環境に追加するのは大変な手間がかかりますが、誰もが気軽に自身のデバイスを持ち寄り、箱庭上で気軽に試せる環境を目指しています。
また、教育者として、講義と演習を通じて次世代の技術者を育成することが細合さんのミッションです。特に、デジタルツインの研究を大きなテーマとして掲げていますので、箱庭技術の進化にもこれから貢献したいと語られています。
最後に
箱庭WGでは、多彩な才能を持った人たちが集まってくれています。箱庭で悩んだときは、このチャネルの中から「この人に聞いてみればなんとかなりそう」と思って、いつも相談させてもらっています。
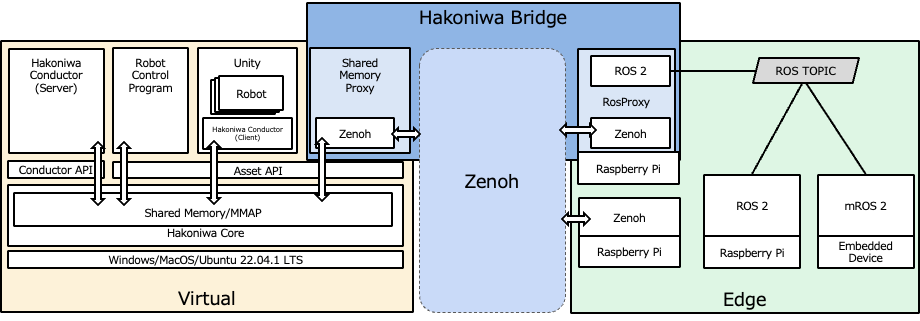
細合さんは、間違いなく「箱庭の技術」で悩んだときの相談相手です。最近では、箱庭ブリッジというアイディアを思いついたときに、その具体的な設計や技術的な裏付け、新規性について深くディスカッションできましたし、その成果が下図のようにアーキテクチャ化されました。
箱庭の旅はまだまだ続きます。これからも箱庭WGで一緒に頑張っていきましょう!
略歴(細合晋太郎さん)
2005-2012:北陸先端科学技術大学院大学の修士・博士課程にて、組込みシステム向けのモデル駆動開発に関する研究に携わる
2012-2016:九州大学にて、大学間の連携教育プロジェクトenPiT 組込みシステム分野にて教育や教材開発を担当
2016-2022:株式会社チェンジビジョンにて、UMLツールastahの開発やモデリングに関するコンサルティングを行う
2022-2024:東京大学にて、5Gネットワークにおける通信ミドルウェアに関する研究を担当
2024-:ものつくり大学 情報メカトロニクス学科・講師として、ロボットやデジタルツインに関する研究を開始
コメントを残す