忘れもしない 4/29 の午後。大阪・関西万博での箱庭ドローンイベントがひと段落した時、一通のメールをいただきました。
そのメールには、「ARLISS」という国際的な大会に挑もうとしていることと、そして、箱庭ドローンシミュレータを使ってみたいという、熱のこもった言葉が綴られていました。
御社のドローンシミュレーターに興味があり、ご連絡いたしました。まず簡単な経緯についてご説明いたします。アメリカで模擬人工衛星Cansatの実験・コンテストであるARLISSという大会がありまして、私どもの有志のチームでそれに参加することにいたしました。具体的なミッション内容としましては、衛星をロケットに搭載し、高度約4kmまで打ち上げ、パラシュートで降下したのち数km先のゴールへ向かうというものです。例年ローバーやドローンを制作する団体が多いのですが、私どもはここ数年の東大チームと同様ドローンで挑戦することにしました。その中でドローンの開発方法について調べていたのですが、御社のHPに辿り着きまして、箱庭ドローンシミュレーターをぜひ使ってみたいと思いました。そこでGitHubのReadmeに従ってインストール作業をしていたのですが、私の環境では以下の様にいくつかエラーが発生してしまいました。最初の2つは解決したのですが、3つ目の解消の仕方がわからず、もし可能でしたら解決法についてご教示いただければ幸いです。
今回のブログでは、その挑戦の軌跡を「利用事例」としてご紹介させていただきます。
以下、東大チームの皆さんの直筆の投稿記録になります。
ARLISS大会とは
「ARLISS(A Rocket Launch for International Student Satellites)」は、模擬人工衛星(cansat)を自作し、アメリカのアマチュアロケット団体の打ち上げによって高度約4kmから投下。その後、地上のゴールを目指すという競技です。
東京大学チーム「正鵠」は、そのゴール到達手段にドローンによるフライバック方式を採用しました。
こちらは、チーム正鵠(せいこく)のロゴマークです(かっこいい!)。

(チーム正鵠のロゴマーク)
大会の流れは、下図のようなイメージです。
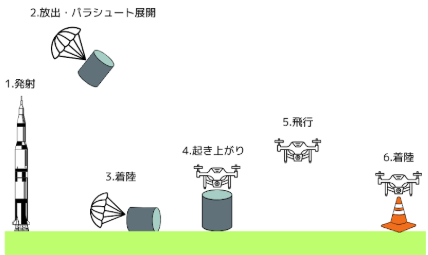
- ロケットを打ち上げ、高度約4kmまで上昇します。
- そこから、正鵠のCanSatがロケットから放出されます。
- 投下後はパラシュートが開き、地上へ安全に着陸します。
- 着陸を検出した後、起立機構により、ドローンが自律的に起き上がります。
- そこから、ドローンの自律飛行が開始されます。
- 事前に組み込まれた制御プログラムに従い、数km先のゴール地点に着陸して競技は完了します。
ここで、正鵠のCansatとは、下図のものです。

上半分は実際に飛行するドローン部分。
下半分は、倒れた状態から起立させ、離陸を安定させるための機構になっています。
そして、こちらが、チーム正鵠の試験の様子になります。
実際にどのように起立し、飛行していくのか、動画でご覧ください。
Cansatは起立・展開した後、GPS航法によって約1kmの飛行を行います。
その後、機体に搭載されたカメラによる画像処理を用いて相対航法を行い、
ゴールまでピンポイントで誘導します。
ぜひ最後までご覧ください。
箱庭ドローンシミュレータの役割
チームの大きな壁の1つは、PX4の「ブラックボックス」問題。
これまで東大チームを悩ませてきた領域ですが、
今年は 箱庭ドローンシミュレータを活用することで大幅に改善が図れました。
特に、以下の4つの課題に対する対応が重要なポイントでした。
– PX4の「ブラックボックス」問題
– 冗長設計の検証の難しさ
– 試験環境の制約
– 安全面のリスク
これらに対して、箱庭ドローンシミュレータがどのような助けとなったか、それぞれご紹介します。
PX4の「ブラックボックス」問題
実は…、PX4やMAVSDKのドキュメントには記載のない挙動が多く、
実際の制御では「そもそもどう動くのか」が分からない状況がありました。
箱庭で事前実験を重ねることで、挙動の不確実性を減らし、これまで見えなかった仕様も解明できました。
冗長設計の検証の難しさ
ドローンに不具合が生じた場合の冗長設計は、実機では再現が難しく検証が困難でした。
シミュレーション環境を利用することで、故障時の挙動を再現し、アルゴリズムの健全性を確認できました。
試験環境の制約
さらに、ドローンの試験場がほとんどなく、飛行試験の機会が限られている中、場所を選ばず制御実験を行える点も、ドローン開発において非常に大きな助けとなりました。
飛行試験に行く前にシミュレーションで動きを確認できるので、文法エラーやアルゴリズムエラーが大幅に減少しました。
また、ドローンのハードの問題で挙動がおかしいのか、ソフトの問題なのかの切り分けをスムーズに行うことができ、効率的に飛行試験を行うことができました。
ここで、代表例として、ゴール地点での着陸位置制御について紹介します。着陸位置は、上空からの画像認識で、地上の着陸位置(4個の赤いマーカー)の認識とそこへ向けた飛行制御が必要となります(下図)。

図:箱庭を利用した画像航法の写真。ドローンに搭載されたカメラから、ゴールを撮影し、中心座標を求め、誘導する。左が、Unityで作成したゴールで、右がカメラ認識結果。
これを、箱庭ドローンシミュレータ(Unity側)で再現し、飛行試験を行うことができました。
そして、下図のものが、実機で実際に試験した時の画像データと認識結果です。
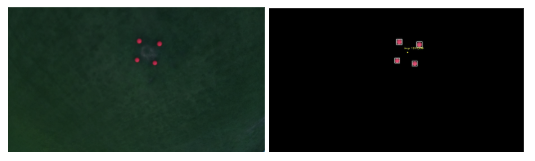
図:最初に添付した動画の時の画像航法の写真。ドローンに搭載したカメラで実際に撮影したもの。
今回、箱庭ドローンシミュレータの仕組みを利用することで、
実機でのテストがスムーズに行うことができ、ゴールを認識して着陸誘導することができました。
安全面のリスク
ARLISSのCanSatは重量制限が非常に厳しいため、ドローンにプロペラガードを装着する余裕がありませんでした。
その結果、Raspberry Piによる自動操縦には大きなリスクを伴う状況となりました。
そこで、事前にシミュレーションを実施することで、危険挙動の発生確率を大幅に抑えることができました。
箱庭ドローンシミュレータは、このように、限られた時間と環境の中で挑む学生チームにとって大きな支えとなりました。
本番と成果
残念ながら大会本番ではシミュレーションでは想定できなかった不具合が発生し、公式記録には悔しい結果が残りました。
しかし、その後、着地地点からの試験飛行では ゴールからわずか80cmという精度での着地に成功。
これは、箱庭ドローンシミュレータを通じた事前検証と試行錯誤があったからこそ到達できた成果だと中田さんは語ってくれました。

(飛行試験後の集合写真)
右の赤いボールがゴール。その左側にあるのがチーム正鵠のcansatです。
4つの赤いボールの中心から約80cmの距離まで近づきました。
未来へ
「今後も後輩たちが箱庭を使う機会があると思います。その際にはぜひお力添えを」
との言葉をいただきました。
箱庭ラボとしても、学生さんの挑戦を技術面で支えられたことを誇りに思います。
チーム「正鵠」の皆さま、本当におめでとうございます。
そして、素晴らしい挑戦を共有してくださり、ありがとうございました。
おわりに
今回のエピソードは、シミュレーション技術が「挑戦の可能性を広げる」ことを改めて教えてくれました。
私たち箱庭ラボは、研究者・学生・エンジニアの皆さまと共に、これからも新しい挑戦を支えてまいります。
コメントを残す