このたび、日立産業制御ソリューションズの
牧野 進二さんが、ご自身の GitHub リポジトリにて、
PX4 × 箱庭ドローンシミュレータの実践ドキュメント
を公開されました。
牧野さんのプロフィールはこちら:
https://www.hitachi.co.jp/products/it/oss/ospo/index.html
箱庭ラボとして、心より感謝申し上げます。
ドキュメント内容
本ドキュメントには、
箱庭ドローンシミュレータを PX4 と接続し、
実際に動作させるための実践的な情報
が丁寧にまとめられています。
箱庭ドローンシミュレータの仕組みやリポジトリ構成の解説から始まり、
環境構築・インストール手順に至るまで、
初めて取り組むユーザでも流れを追えるよう、きめ細かく解説されています。
また、本ドキュメントは Ubuntu 24.04 をターゲットとしており、
現在の開発環境に即した形で再現性の高い手順が示されている点も、大きな特長です。
手順書の構成:
見どころ1
まず重要なポイントとして、箱庭ドローンシミュレータのアーキテクチャが非常に整理された形で示されている点が挙げられます。
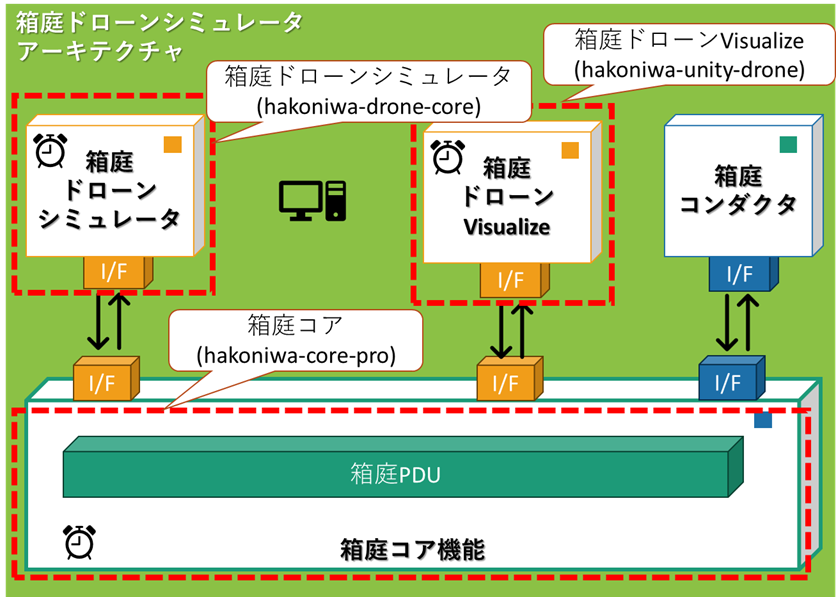
(箱庭ドローンシミュレータのアーキテクチャ)
システム全体の構成や各コンポーネントの役割が明確になっているため、
「何がどこにあり、どの機能がどの役割を担っているのか」を把握した上で読み進めることができます。
そのうえで、各種機能のインストール方法が構成に沿った順序で説明されている点が秀逸です。
単に手順を並べるのではなく、
機能構成を理解した上で「何を、なぜインストールするのか」という視点で整理されており、
これはエンジニアにとって非常に重要な配慮だと感じました。
見どころ2
次に、「箱庭ドローン飛行のビジュアライズ環境構築手順」では、
Ubuntu 環境における Unity のセットアップ手順が非常に丁寧に解説されています。
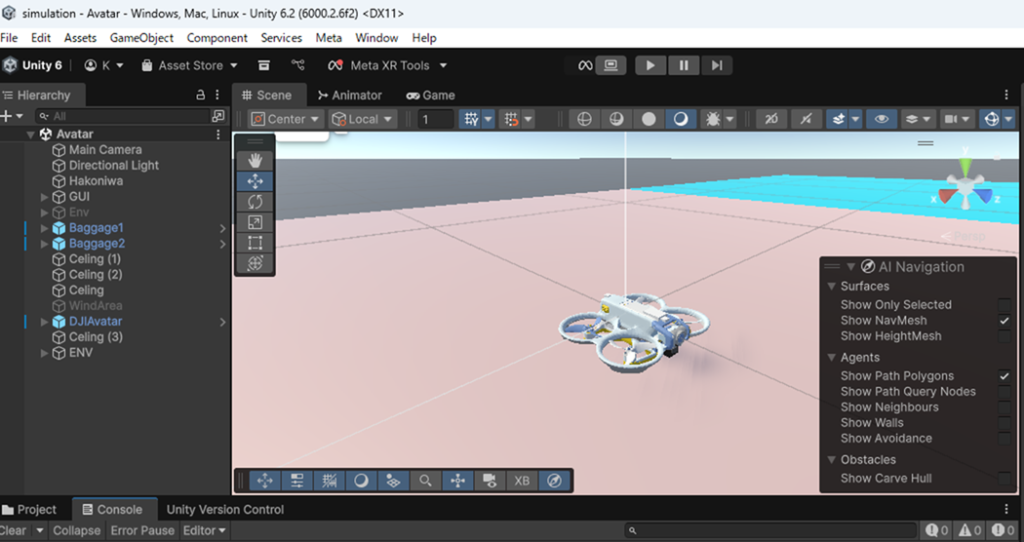
(説明の1シーン)
単に必要な操作を列挙するのではなく、
各手順の意味や注意点も含めて説明されているため、
Unity を初めて利用する方でも迷わず進められる内容になっています。
シミュレーションの可視化は導入時のハードルになりがちですが、
こうした配慮のある説明は、初心者の方にとって非常にありがたいポイントだと感じました。
見どころ3
そして、「PX4と箱庭ドローンシミュレータ動作確認手順」では、
PX4 を PS4 コントローラで操作するという、
かなり技術的に尖ったアプローチが紹介されています。

ちなみに、PX4とPS4コントローラの間の通信はUDP通信で、自作されたそうです(すごすぎる)。
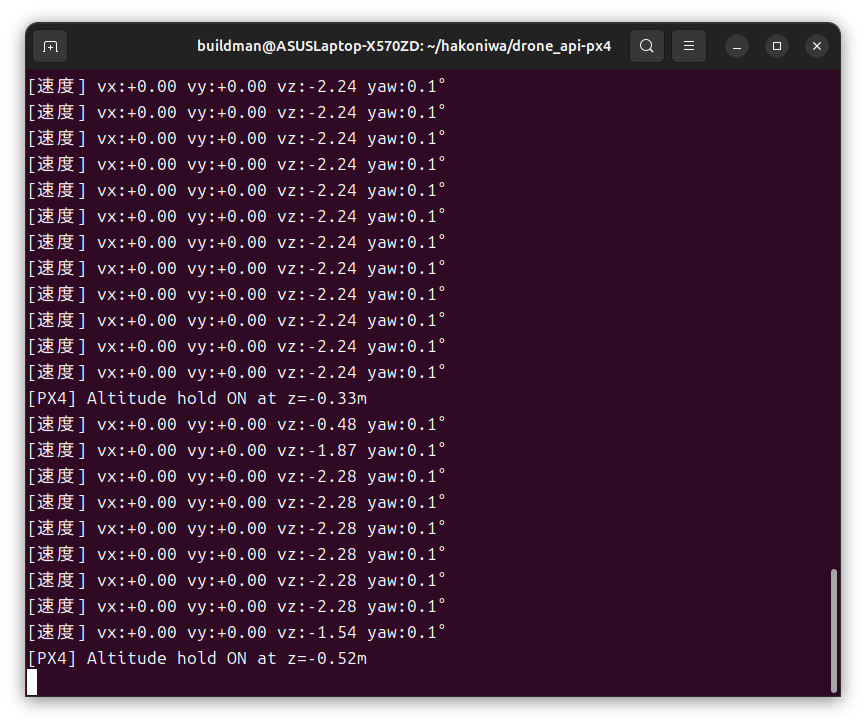
(操作ログメッセージ)
見どころ4
さらに、驚きなのは、LiDARのビジュアライズです。
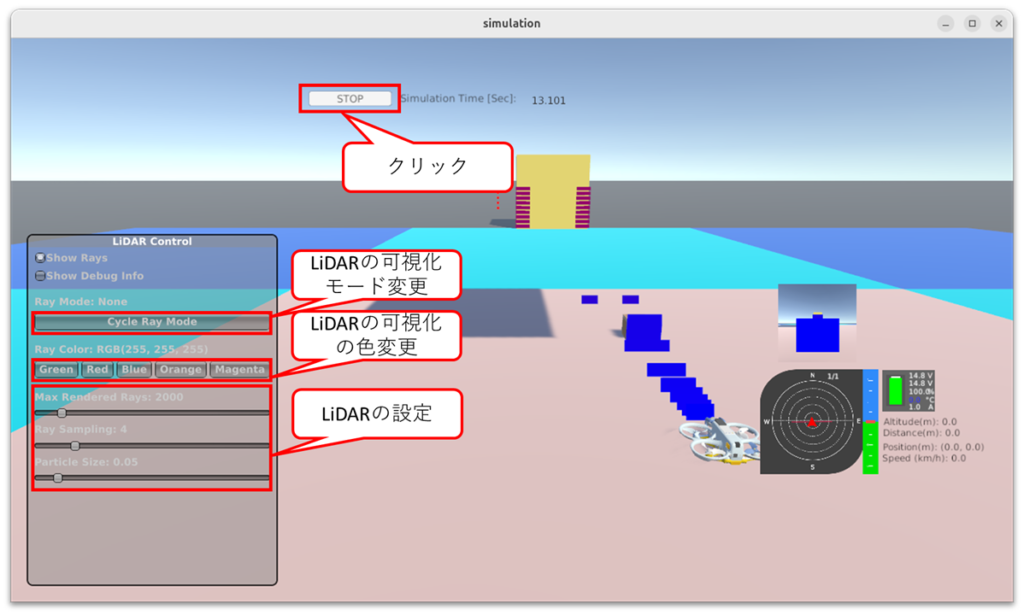
ご自分で箱庭ドローンのUnityスクリプトを作成され、UIで、LiDARの可視化の調整をできるようなっているのです!
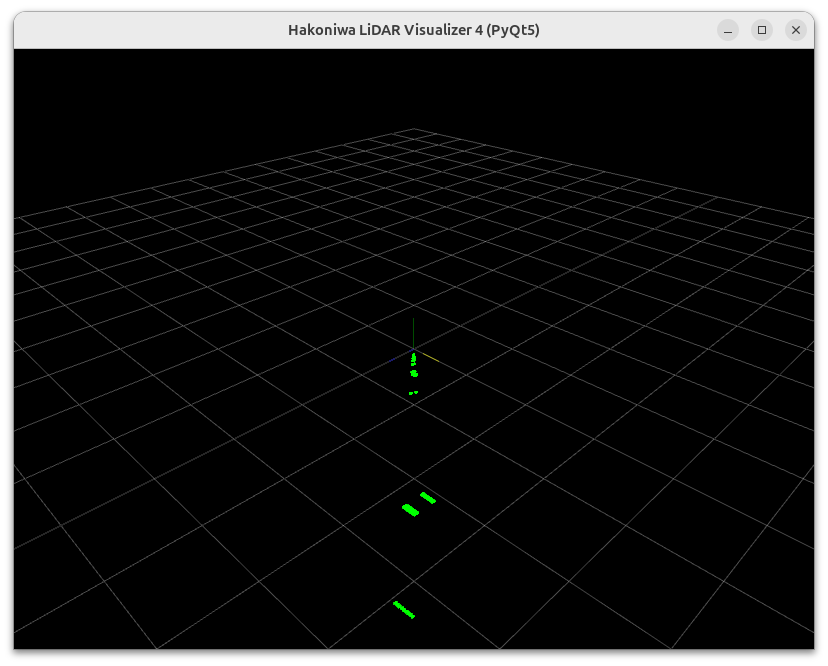
さらに、それだけじゃありません。
LiDARのデータは、箱庭PDUデータとして共有メモリに書き込みされていますが、そのデータをPythonで読み取り、ビジュアル化までされておられます。
ドキュメントでは、
「用途に合わせて使い分けてください。」
と一言(謙虚すぎます)。
最後に
最後に、少し個人的な感想を述べさせてください。
本ドキュメントの作成日付を見ると、1 月 2 日となっています。
年末年始という時期を考えると、
プライベートな時間を割いて丁寧にまとめられたのではないかと想像してしまいます。
また、Issue 上のやり取りを拝見するかぎり、
環境構築や動作確認の過程では、
あの「Unity おじさん」もテストやデバッグに関わっておられたことが伺えました。
(※) Unityおじさんは、箱庭ラボの過去ブログでもご登場いただいたことのある方で、
牧野さんの Unity における師匠的存在として知られています。
複数の知見と実体験が重なって磨き上げられたからこそ、
本ドキュメントはここまで実践的で再現性の高い内容になっているのだと感じています。
あらためて、こうした貴重な知見を公開してくださったことに、
箱庭ラボとして深く感謝申し上げます。
合同会社 箱庭ラボ
担当:森崇
コメントを残す