2024年12月29日(日)、箱庭ラボは、次世代ドローンシミュレータを目指して、箱庭ドローン・コア機能(hakoniwa-drone-core)を1stリリースしました!
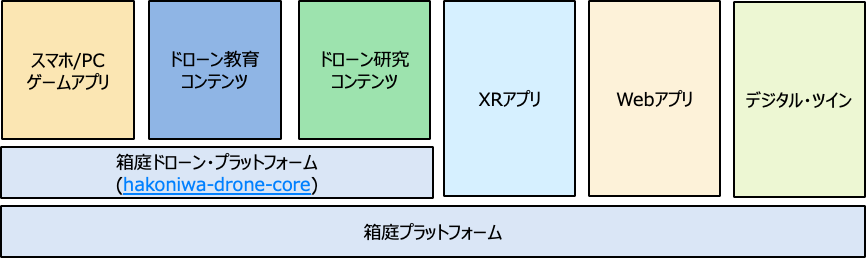
これまでの「hakoniwa-px4sim」の成果を基に、より拡張性と汎用性を高めた設計となっています。このリポジトリは、ドローンシミュレーションに関わる多様な用途に対応し、ゲーム、教育、研究、物流などで幅広く活用されることを目指しています。
ちなみに、hakoniwa-px4simの1stリリースは、2023年12月29日(金)でしたので、ちょうど1年の節目を迎えた新たなステップになります。
コンセプト:シミュレーションの世界を飛び出す!
「シミュレーションの世界を飛び出す!」をモットーに、以下の3つを柱にしています:
1. シンプルさ
- 機能毎に責務分割したコンポーネント設計。
2. 多様性
- ゲーム、教育、研究、ビジネスなど、幅広い用途を目指す。
3. 接続性
- PX4/Ardupilot、ROS、スマホ、XR、Web、デジタル・ツインといった多様なプラットフォームとの連携を実現。
アーキテクチャ
箱庭ドローンコア機能のアーキテクチャは、下図のように機能ごとに責務分割し、それぞれライブラリ化可能な構造にしています。
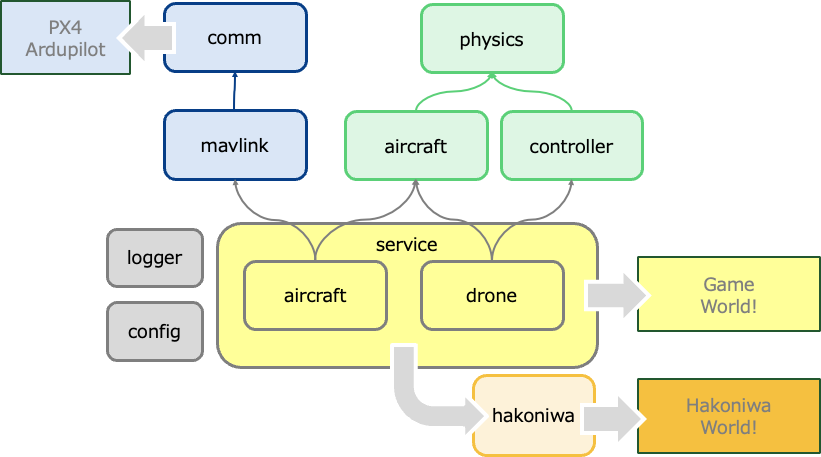
- 通信モジュール (comm/MAVlink): TCP/UDP通信をベースにしたMAVLink通信インターフェース。
- 物理モデル (physics/aircraft): ドローン物理モデル。
- 制御モデル (controller): ドローン制御モデル。
- サービス層 (service): 箱庭なしで、ドローンのシミュレーションを利用可能。
- 箱庭層(hakoniwa): 箱庭を利用して、多様な用途での利用が可能。
おわりに
この1stリリースは、ドローンシミュレーションの可能性を広げる大きな一歩です。次世代の教育、研究、エンターテインメント、物流分野での活用に期待しています。
プロジェクトや開発への参加、フィードバックをお待ちしています!詳細は hakoniwa-drone-core をご覧ください。
合同会社 箱庭ラボ 担当:森崇
コメントを残す