TOPPERS/箱庭WGのチャレンジ ROSCon 2023 へのプロポーザルが採択されました!また、レビュアーから高い評価・期待をいただきましたので、その内容を紹介したいと思います。
狙い
今回のプロポーザルの狙いは、なんといっても高瀬先生が研究されておられる mROS2 と箱庭の融合にあります。
mROS2は、RTPS(Real-Time Publish-Subscribe)プロトコルによる出版購読通信を軽量に実現 する実行環境です。主にリアルタイムOSおよび組込み向けの軽量な通信プロトコルスタックから構成されています。mROS2の最大の利点は、ROS2ノードと通信可能なロボットソフトウェアを小規模な組込みデバイス上で実行できることです。通常のROS2では必須であるLinuxカーネルの稼働 は不要であり、また、ホストデバイス上で動作しているROS2ノードとの通信経路の確立が自律的 に行われるところにも特徴があります。
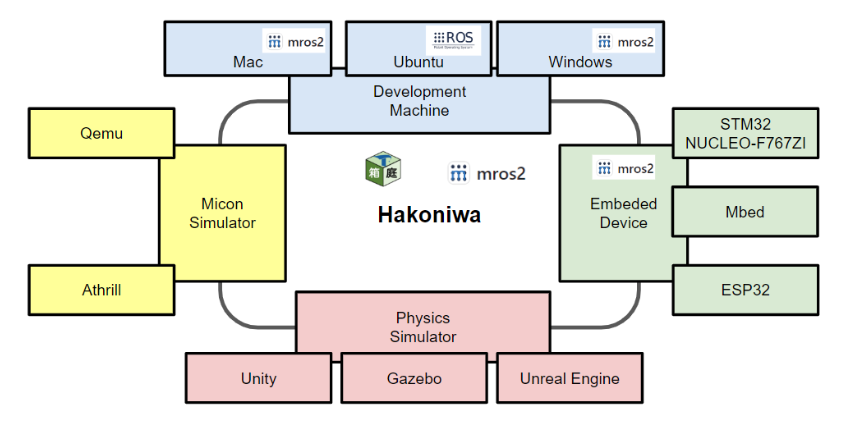
この mROS2 と箱庭が融合するとどういうことになるかと言いますと、下図のように、mROS2 がサポートする組み込み機器と箱庭が繋がって、デジタルツインのような環境が容易に実現できようになるのです!
そして、このような構成を実現するアーキテクチャとして考えたものが下図のものです。
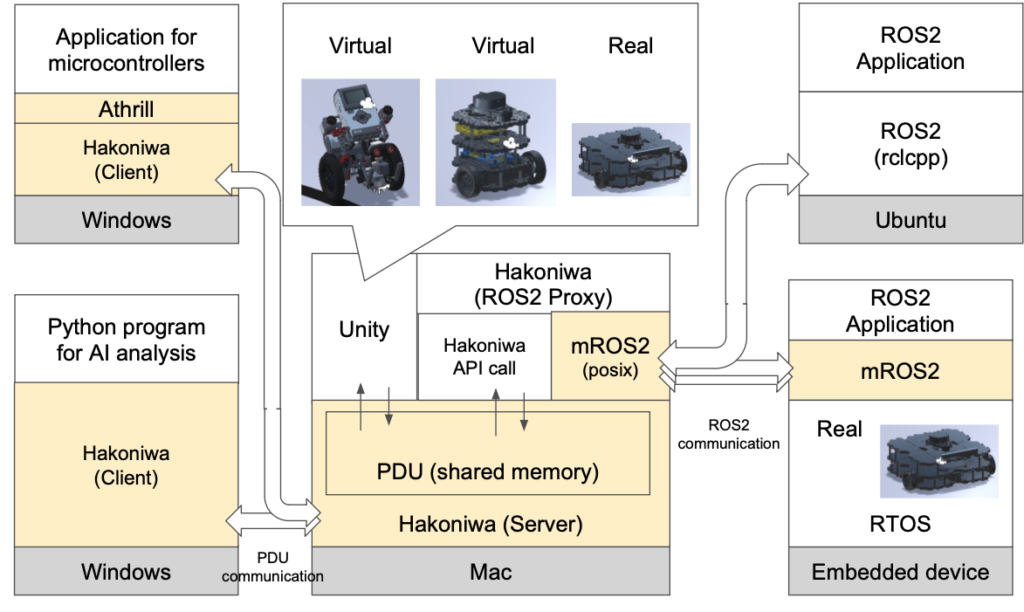
真ん中に箱庭があります。この箱庭の中で、mROS2が外の世界(実機)と繋がります。また、同様に箱庭の中にいるUnity内にはVirtualと書かれている仮想のロボットがいますが、Realと書かれているロボットもいます。このロボットはmROS2を通してデジタルツインのように存在する仮想ロボットです。
このような構成であると、リアルな世界のロボットが仮想の世界のロボットと箱庭/mROS2を通して繋がることができるのです。目の前にいる本物のロボットが、現実世界には存在しないロボットとコミュニケーションできるとしたらワクワクしませんが?
レビュアーからのコメント
この提案に対して、レビュアーからのコメントとしてはこのようなものでした(一部抜粋、概要を翻訳しました)。
素晴らしい提案ありがとうございます!この提案は多くのROS開発者にとって価値があります。そして今日でなくとも、彼らが解決策を展開する必要がある近い将来には価値があるでしょう。私はこれがROSConにとって素晴らしいトピックであり、あなたが独自の貢献を共有する素晴らしい機会だと思います。
配点としても Impact/Impressinon が高得点でしたので、この箱庭&mROS2を融合した技術に対して将来性を感じ取っていただけのかなーーっと推測しております(とてもありがたいです)。
最後に
今回のプロポーザルは、私の方で原案を構想・日本語化し、高瀬先生に英訳していただき投稿までご対応いただきました。また、箱庭WGメンバ内でもレビューしていただきながら育て上げたものです。オープンソース・コミュニティの力です。
高瀬先生の発表楽しみにしています!
Day Two, October 20th, 2023
14:50 CST
コメントを残す