箱庭ドローンシミュレータ(MuJoCo版)において、PIDパラメータの完全自動チューニングに成功しました。
従来、PIDチューニングは試行錯誤に依存し、時間と熟練を必要とする作業でしたが、本仕組みにより、短時間で安定した制御パラメータを導出できるようになりました。
本取り組みでは、チューニングプロセスをフェーズごとに分割し、それぞれに評価関数を定義することで、制御設計を構造化しています。さらに、Optunaによる探索と組み合わせることで、再現可能な自動チューニングを実現しました。
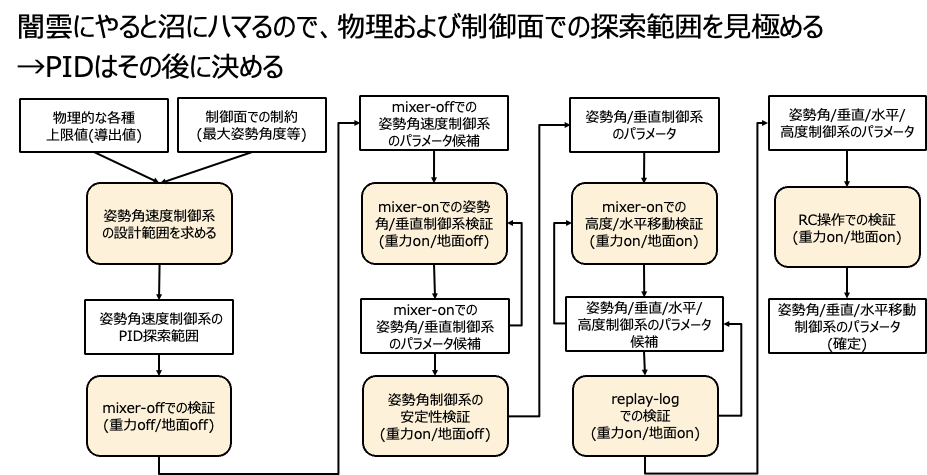
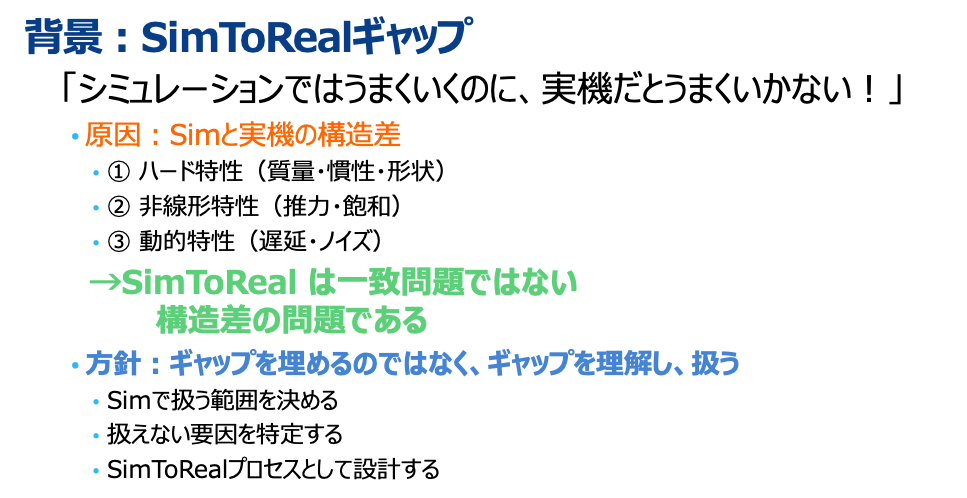
また、単なる最適化ではなく、SimToRealを前提としたプロセス設計(Sim Envelope / Gap Taxonomy)を取り入れており、「どこまでをシミュレーションで担保し、どこを実機で検証するか」を明確にしています。
自動チューニングデモ
■ PIDパラメータ自動チューニングの実行例
■ 自動チューニングされたパラメータによるRC操作
Docswell で一般公開
本取り組みは、制御設計を「属人的な調整作業」から「再現可能なプロセス」へと転換するものです。
詳細は以下の資料をご覧ください。
合同会社 箱庭ラボ
担当:森崇
コメントを残す