さて、今回は、いよいよ 箱庭コンダクター 編です。
……と、その前に。
コンダクターの役割をきちんと理解するためには、
じつは そもそも論としての分散シミュレーションの課題 を
一度整理しておく必要があると感じています。
- 時間のズレ、
- 計算結果の到達タイミング、
- 順序の不一致。
こうした話は、分散システムに関わっていれば
どこかで一度は耳にしたことがあるはずです。
ただ、それらが 実際にどんなペインを生むのか、
そして なぜそれが簡単には解決できないのか については、
意外と整理されないまま使われていることが多いように思います。
そこで今回は、
いきなりコンダクターの話に入る前に、
分散シミュレーションが抱える“当たり前の落とし穴”
を一度、俯瞰してみたいと思います。
分散シミュレーションのペイン
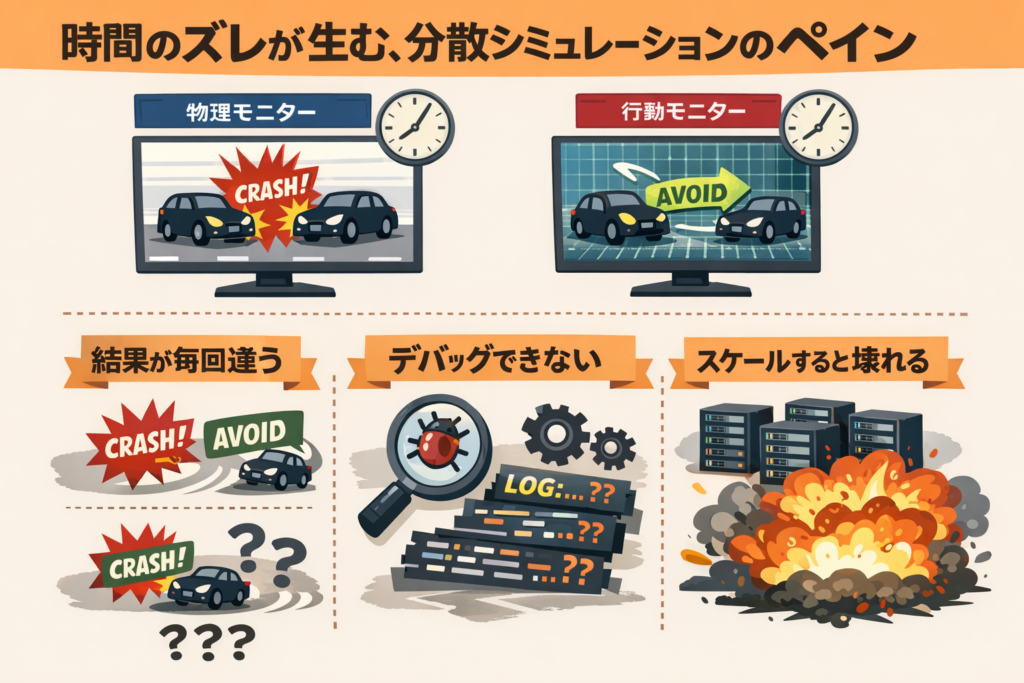
こちらが、そのペインを描いたものです。
じつは、これらのペインは、単に「時間がズレる」ことが原因ではありません。
問題は、
そのズレが、どこまで結果に影響しているのか分からなくなること
にあります。
物理モニターと行動モニターが別々に存在する世界
この例では、上段に、 2つのモニターが描かれています。
- 左が 物理世界のモニター
- 右が 車(エージェント)の行動モニター
どちらも同じ世界を見ているように見えますが、
実際には 別々のノードで、別々の計算結果 を観測しています。
それぞれが返してくるのは、
- 「この時刻に、衝突が起きた」
- 「この時刻に、回避行動を選択した」
という 事実の候補(まだ世界として確定していない情報) です。
問題は、どちらも「間違っていない」こと
ここが重要です。
物理モニターも、行動モニターも、
自分の立場では正しい情報を伝達しています。
正しい。そう、まったく正しいのです。
しかし、それらの情報をモニタリングしているノードにおいて、
問題の原因を分析しようとした瞬間に、困る場合があります。
たとえば、衝突映像が先に届いた場合、
私たちは「衝突判定の検出が間に合わなかった」と解釈します。
一方で、回避行動のサインが先に届いた場合には、
「衝突判定は間に合ったが、行動が間に合わなかった」と解釈します。
しかし分散環境では、
この観測順序そのものが、
通信遅延などの影響によって毎回変わってしまう。
その結果、
どちらの因果関係を採用すべきかを、
一意に決めることができなくなるのです。
どちらの情報も「正しい」けれど、
因果関係が見えなくなる。
これが、分散シミュレーションにおける
最も厄介なペインです。
問題は、
「どの情報を信じるべきか分からない」ということではありません。
すべての情報が正しいにもかかわらず、
ストーリーが組み立てられなくなることなのです。
順番が変わるだけで、解釈が変わってしまう
分散環境では、
- 計算時間の違い
- ネットワーク遅延
- ノード負荷
によって、これらの結果が届く順番は毎回変わります。
その結果、
- ある実行では「衝突した」ことになり、
- 別の実行では「回避できた」ことになる
――という状態が生まれます。
人間がみれば、解釈が変わってしまいます。
コンピュータの制御ソフトからみれば、判断→実行の流れが変わります。
これが、図の下段に描かれている
- 「結果が毎回違う」
- 「デバッグできない」
- 「スケールすると壊れる」
というペインに、直結するのです。
重要なのは「ズレ」ではなく「判断不能」
ここで一つ、誤解しやすい点があります。
問題は、
時間がズレていること
そのものではありません。
本当の問題は、
どの事実を、その時刻の世界として
採用すればよいのか分からなくなること
です。時間のズレは避けられない。
しかし、判断基準がない状態は避けなければならない。
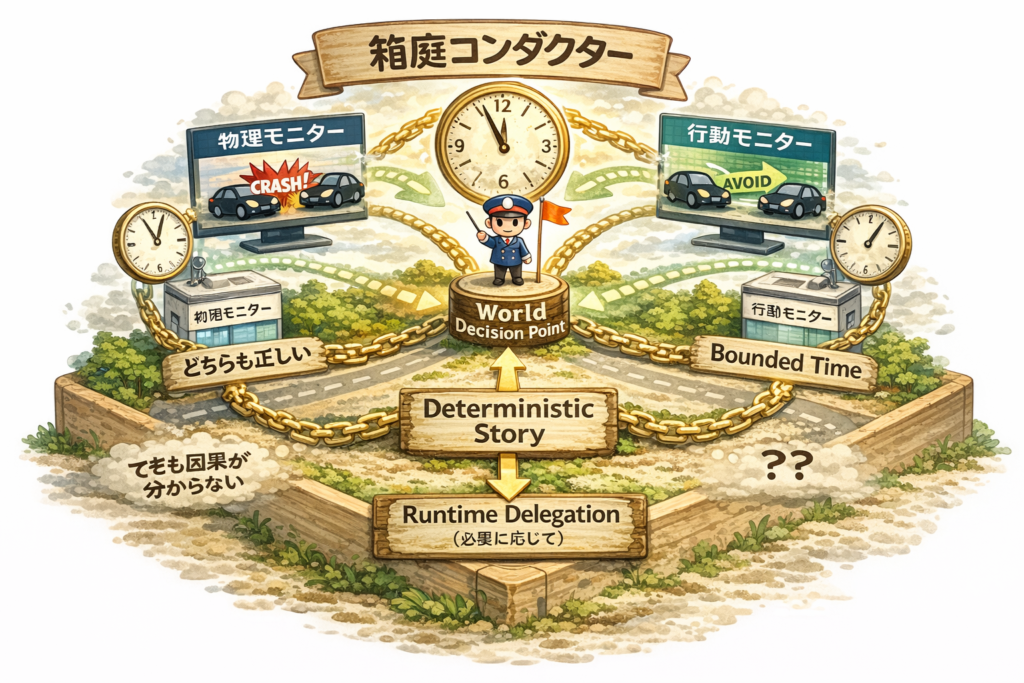
箱庭はどう考えるか
箱庭は、この問題に対して、
- 「完全に時間を揃えよう」
- 「すべてを再現可能にしよう」
という理想論では戦いません。
そうではなく、
- 時間のズレは bounded にする
→ 「一定範囲のズレは許容する」など、範囲を決める - 時間の調整は一元管理する
→ 基準となる時間を作り、分散ノードはその時間にしたがって動く - 再現性が必要な局面だけを切り出す
→ 衝突の瞬間だけ、シミュレーションを同一ノードに集約するなど
そして、その中心にいるのが、 「箱庭コンダクター」 なのです。
次回は、このコンダクターが どのように世界を確定しているのか、
もう少し具体的に見ていきます。
つづく。
コメントを残す