2024年12月17日(火)、「箱庭ドローン・シミュレータ」v2.8.0のリリースをお知らせいたします。今回のアップデートの目玉はなんといっても、「東尋坊3Dモデル」の一般公開です!

東尋坊3Dモデル公開にあたって
今回の東尋坊3Dモデルは、以下の皆様の多大なご協力のもと作成されました。本当にありがとうございます。

バーチャルスカイ 上野様
- 東尋坊の風景を360度カメラでドローン撮影いただきました。
- 詳細は バーチャルスカイ公式サイト をご覧ください。

小森研究所 小森様
- 撮影データを3Dモデルに変換していただきました。
- 詳細は 小森研究所公式サイト をご覧ください。
デモ動画:
機能アップデート内容
今回の機能アップデート内容は以下のとおりです。
- 東尋坊3Dモデルの公開
- バッテリー機能と温度変化の外乱対応
- Unity UIの大幅なアップデート
- ラジコン操作でのRTH(Return To Home)機能
- ラジコン操作のATTIモード対応
- PIDパラメータの再ローディング機能
- 箱庭ARブリッジ機能
- 箱庭ブリッジ(MAVLINK)
アップデートの詳細は、GitHubでご確認いただけます:hakoniwa-px4sim
バッテリー機能と温度変化の外乱対応
バッテリー機能の追加により、ローターの回転数がバッテリー消費に比例して変化するようになり、より現実的なシミュレーションが可能となりました。この機能を実現するためのバッテリーおよびローターモデルの数式については、こちらをご参照ください。
さらに、バッテリーモデルは温度に依存する仕様となっています。そのため、周囲環境の温度変化がバッテリー性能に影響を与え、より多様なシナリオのシミュレーションが可能となります。
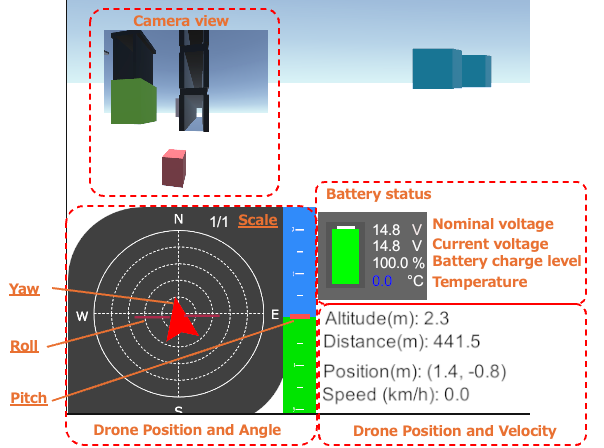
Unity上では、以下の図のようなUIを用いて、この機能を視覚的に確認できるようにしました。
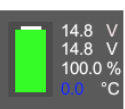
バッテリー機能の詳細については、こちらをご参照ください。
デモ動画:
Unity UIの大幅なアップデート
ドローン操縦用UIのアップデートにより、操作性が大幅に向上しました。特に、操縦用のUIを画面左下に集約したことで、直感的でスムーズな操作が可能となりました。
この改良により、ラジコン操作時の視認性が向上し、操縦ミスの軽減や操作感の一貫性が向上しています。また、操縦中の画面上の情報把握が容易になり、より快適にドローンの操作を行えるようになりました。
アップデート後のUIは以下の画像をご参照ください。
ラジコン操作のRTH(Return To Home)機能
ラジコン操作に Return To Home (RTH) 機能を実装しました。この機能により、ドローンが現在のホームポイント(離陸地点)にボタン一つ(三角ボタン)で自動的に戻ることが可能になります。
RTH機能は、高速移動中にドローンを見失った場合や、飛行中に位置を把握しづらくなった場合に非常に便利です。
なお、RTH実行中は、以下の点にご注意ください。
- ラジコン操作を受け付けません。
- 障害物の自動回避はされません。
ラジコン操作のATTIモード対応
新たに ATTIモード (Attitude Mode) に対応しました。このモードではGPSや位置情報による自動制御が行われませんので、風や空気摩擦の影響を直接受けます。そのため、ドローン操縦の難易度はとても高くなります。
ATTIモードの利点
- GPS信号が弱い場所での操縦
GPSに依存せずに飛行可能なため、トンネルや密集地などGPS信号が届きにくい環境でも安定した操作が可能です。 - プロ向けの操縦スキル向上
操縦者自身の技術が求められるため、より高精度なコントロールを練習する環境を提供します。 - シネマティックな映像撮影
自然な操作感覚を得られるため、滑らかな映像を撮影する際に特に有効です。
箱庭ドローンシミュレータを ATTIモードでのドローン操作訓練 に活用することで、プロフェッショナル向けの環境として、スキルアップや特殊用途の練習が可能になります。
PIDパラメータの再ローディング機能
箱庭ドローンは、PIDパラメータ(比例、積分、微分の制御値)を調整することで、ドローンの動きをユーザーの好みに合わせて微調整することができます。しかし、従来の仕様では、PIDパラメータの変更を反映させるためにシミュレーションの再起動が必要でした。
今回のアップデートでは、PIDパラメータの再ローディング機能を追加し、以下の手順で簡単に変更内容を反映できるようになりました:
- STOPボタンを押下:シミュレーションを一時停止し、PIDパラメータを変更します。
- RESETボタンを押下:変更したPIDパラメータが適用されます。
- STARTボタンを押下:シミュレーションを再開し、変更後のパラメータで動作を確認できます。
これにより、シミュレータを終了させることなく、素早くPIDパラメータの調整と評価が可能となります。パラメータの微調整を効率よく行えるため、理想的なドローンの動作を実現するための検証プロセスが大幅に改善されています。
箱庭ARブリッジ機能
前回のアップデートで、箱庭ドローンをAR空間で体験できる機能を導入しました。しかし、位置合わせの手間や運用面での課題がありました。そこで、今回のアップデートでは、新たに 箱庭ARブリッジ機能 を追加し、これらの課題を解決しました。
この機能の主な特徴は以下の2点です:
- ARデバイス(QUEST 3)と箱庭ドローンシミュレータの自動ネゴシエーション機能
- ARデバイスとシミュレータ間での通信を自動的に調整します。
- 通信切断やアプリケーションの終了といった状況が発生しても、片方の再起動だけで自動再接続が行えるため、運用の手間を大幅に軽減します。
- ARデバイスの位置合わせを任意のタイミングで実行可能
- 連続運用をしていると位置ズレはどうしても発生します。しかし、本機能を利用することでシステムを再起動なしに位置調整が可能になります。
今回のアップデートにより、AR空間での箱庭ドローン体験がより直感的でスムーズになり、操作性と実用性が大幅に向上しました。
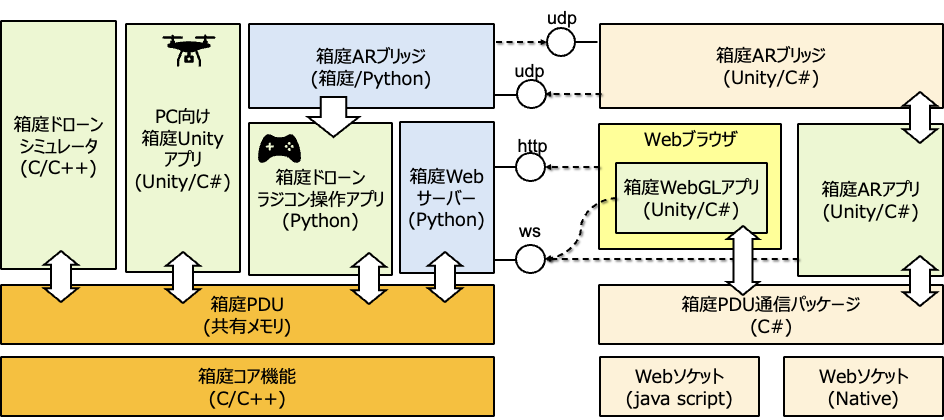
(箱庭ARブリッジの全体アーキテクチャ図)
箱庭ブリッジ(MAVLINK)
MAVLink 箱庭ブリッジは、Mission Planner から送信される MAVLink UDP パケットを受信し、Vehicle(ドローンやローバー)の位置情報およびサーボ情報を 箱庭 PDU データとして書き込む機能を提供します。
このブリッジ機能により、以下のような利用が可能になります:
- Unity 空間でのビジュアライズ
- 箱庭 Unity アセットを使用することで、Unity 内に仮想的なドローンを再現可能です。
- Mission Plannerで計画したフライトや操作を仮想環境内でリアルタイムに可視化し、シミュレーションやデモンストレーションに活用できます。
- シミュレーションシステムとの連携強化
- 他の箱庭シミュレーションシステム(箱庭ARブリッジや箱庭Webサーバー)とのデータ連携が容易になります。
- カスタマイズ性が高く、独自のシステム拡張や用途に応じた柔軟な設定が可能です。
この機能は、仮想空間を用いた開発やシミュレーションの効率を大幅に向上させ、箱庭システムのさらなる応用を支援します。
詳細はこちらを参照ください。
デモ動画:
合同会社 箱庭ラボ 担当:森崇
コメントを残す