先月の箱庭ドローンシミュレータのリリース以来、久しぶりのブログ更新です。ここ最近、納品作業に追われてドタバタしておりました。おかげさまで、箱庭ドローンPROのユーザが少しずつ増えてまいりました。
リュックが重かった
箱庭ラボができたとき、ぼくは、はじめて「出張用のリュック」を買いました。それまでは手提げバッグばかり使っていたのですが、
久しぶりの出張で東京に行った時に──とくに電車の中で──
ほとんどの人がリュックを背負っていることに気づいたんです。
手提げだと、とにかく動きにくい。パソコンも書類も、荷物が増えると腕がすぐに疲れてしまう。
「これはもう、真似した方がいいな」と思って、近くの百貨店でひとつ買いました。
箱庭(もちろん箱庭ドローンPROも)は、ぼく愛用のMacで動きます。当然ですが、WindowsでもLinuxでも動きます。
ただ、デモ用であればMacで十分だったので、出張は全然余裕でした。ところが、箱庭ドローンPROの主要ユーザーは圧倒的にWindowsなのです。
そのため、開発マシンとして新たにmouseコンピュータのゲーミングPCを購入し、Windowsでのテスト環境を本格的に整えました。
その瞬間から、リュックの重さが“別物”になりました。MacとWindows機を両方持ち歩くことに…。
ケーブル類や検証用デバイスも一気に増え、以前とは比べ物にならない重量になったのです。
先日の出張も、まさにその重さを味わいました。
歩きながら、これまで“デモの世界”にとどまっていた箱庭が、
いよいよ“社会に接続する現場”へと踏み出しはじめた──
そんな重力のようなものをシミジミと感じました。
気になることは全てやる
納品作業って、ほんとうに地道な作業だと思います。
新しい何かを創る時間というよりは、これまで積み上げてきたものが、“当たり前のように動くかどうか” を確かめ続ける時間です。
資料を作り、お客さんの環境を想像しながら、「本当に同じように動くだろうか?」と自問自答する。
そして、ひとつずつ気になる点を潰していく。
こういうケースは? 気になる。やってみる。あれ? 動かない。手順を見直し、もう一度最初からやり直す。
その繰り返しです。誰に見られるわけでもない、拍手もされない作業ですが、
こういう積み重ねが “お客さんにとっての安心” に直結する。
だから、気になることは全部やる。結局、それ以外にできることはないんですよね。
これからの箱庭について考えてます
こんな一言が本当にありがたいです。
「これで、僕の仕事はだいぶ楽になります。」
これまで、箱庭はどちらかというと “デモ中心” で、衝動インで「作りたいものを作る」というスタイルでやってきました。
その勢いと楽しさがあったからこそ、斬新なアイデアも生まれ、万博への出展のような挑戦にもつながったのだと思います。
箱庭ラボも3年目に入り、分岐点に差し掛かっています。
研究や教育の現場から問い合わせが届き、現場の課題を箱庭を活用して解決したいと思っていただける人たちが増え始めています。
でも、ぼくは、箱庭は単なるツール/道具にはしたくないという思いもあります。
たしかに “現場で使えること” は大事です。役に立つこと、仕事が楽になること、課題が解決されること。
それらは箱庭が社会とつながるうえで欠かせない価値です。
Sim as Infrastructure(インフラとしてのシミュレーション)
そんなことを考え始めました。
シミュレーションを、単なる“確認ツール”としてではなく、
社会の基盤に組み込まれるべきもの として捉え直すという考え方です。
道路や電気や通信のように、誰かが意識せずに当たり前に使える。
AI /DT時代について考えてみました
2025年、自分の中で、箱庭開発を通して印象に残ったものは、
- MuJoCO
- ゲームエンジン
- NVIDIA/Omniverse
でした。
この三つは、一見するとそれぞれ違う方向に発展しているようでいて、実は「シミュレーションを社会基盤にする」という視点では一本の線でつながっているのでは?と思ってしまいました。
MuJoCo の OSS化:AIが顧客になった
ご存知の通り、MuJoCoはオープンソースになりました。箱庭もMuJoCo対応を行い、高精度な剛体シミュレーションを利用できるように箱庭アセット化しています。しかし、「この流れは、なぜ起きたのか?」と考えた時、下図のようなビジネスモデルの転換が起きたと思えたのです。
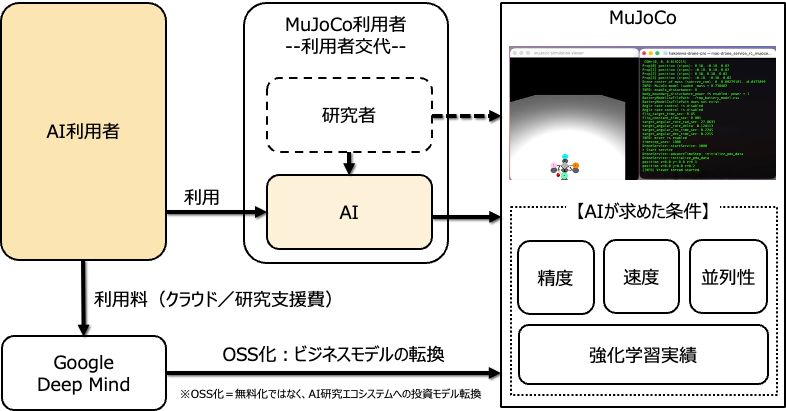
以前の MuJoCo は “研究者を顧客とした有償ソフト” でした。ところが近年、強化学習を中心とした AI 技術が急激に進み、その学習と評価のために「高速で正確な物理シミュレーション」が大量に必要になりました。
つまり AI そのものが MuJoCo の“最大の利用者”になった のです。
そして AI が求める条件は、たぶん、こんな感じではないかと。
- 精度:学習結果に直結する
- 速度:膨大な試行を回すため
- 並列性:クラスタ上で一気に回したい
- 強化学習の実績:既存の学習基盤との親和性
Google / DeepMind が MuJoCo を OSS にした背景には、この 利用者の中心が「人」から「AI」へ移った という変化に見えました。
ゲームエンジンの産業界参入:デジタルツインへ
次は、ゲームエンジン業界の変化です。
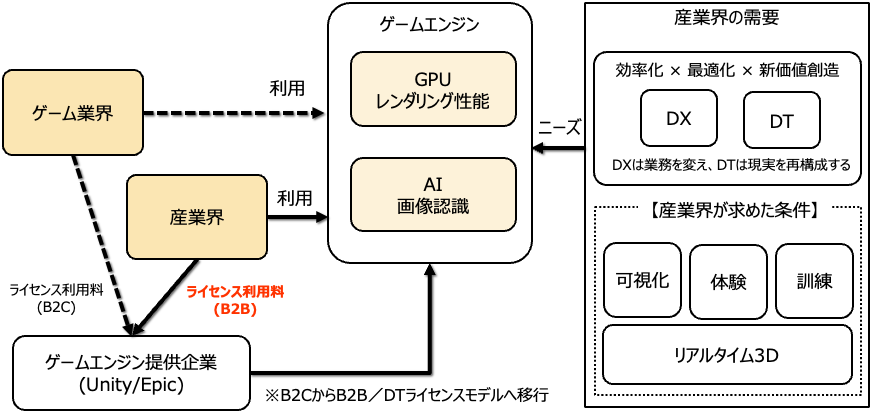
これまでゲームエンジン──たとえば Unity や Unreal Engine ──は、あくまで“ゲームを作るためのプラットフォーム”でした。
しかし今、ご存知の通り、ゲームエンジンは産業界のデジタルツイン(DT)領域へ深く入り込みつつあります。
その理由を分解してみると、「効率化 × 最適化 × 新価値創造」 という流れがあるのではとおもいました。
- DX(業務を変える)
- DT(現実を再構成する)
この二つはもはや単なるバズワードではなく、実際の業務改善や意思決定に直結する重要ワードとなっています。
- 可視化、体験、訓練、リアルタイム3D
これらを全部満たす技術が ゲームエンジン だったのです。今振り返れば、ゲームエンジンは、実は産業界が求めていた機能をはじめから備えていた…
- GPUレンダリング性能(大量の情報をリアルタイム描画)
- AI画像認識との親和性(迅速なモデル検証)
- リアルタイム性(シミュレーションや訓練に最適)
- 拡張性(プラグイン・スクリプトで用途を広げやすい)
Unity や Unreal Engine はここに明確に舵を切り、B2Bでのライセンス利用料を拡大し、デジタルツイン領域に本格参入したわけです。
そして、ゲームエンジンを商用利用しているユーザは、ライセンス利用料の課題にいま向き合っているというわけです。
OpenUSDの台頭:AI/DT時代の共通データ
次は、NVIDIA/Omniverseの存在です。
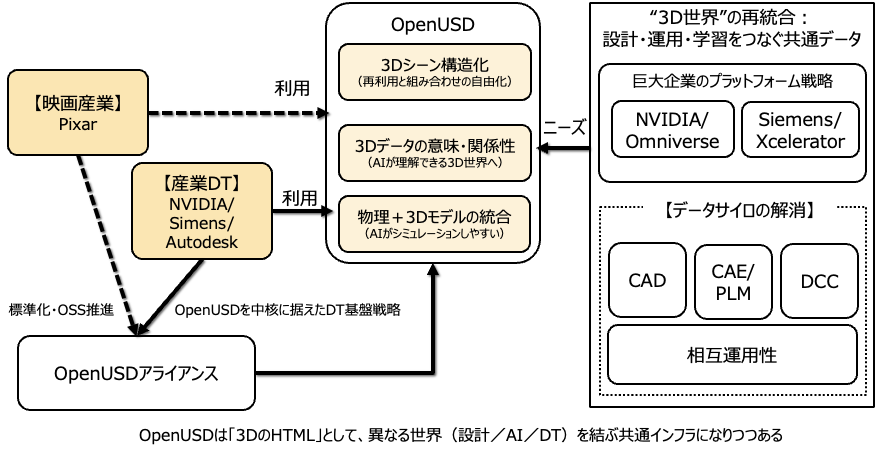
これを語るうえで欠かせないのが OpenUSD です。もともとは Pixar が映画制作のために生み出した技術ですが、
近年は産業界──特に DT(デジタルツイン)──で急速に注目されるようになりました。
なぜ映画の技術が、産業シミュレーションの中心に躍り出たのかと思われるかもしれませんが、
AI / DT 時代に求められる “3D世界の共通データ” の要素があったと思われます。
図にあるように、USD は次の三つを高いレベルで同時に満たしています。
- 3Dシーン構造化
- 膨大な3Dモデルを「再利用できる形」で扱える
- 組み合わせや差し替えが自由
- DTのように巨大な世界を作るのに向いている
- 3Dデータの意味・関係性
- 単なる見た目の3Dではなく
“AIが理解できる3D世界” を構成できる - 物体の属性・関係性・階層が表現可能
- 単なる見た目の3Dではなく
- 物理 + 3Dモデルの統合
- 3Dの見た目と物理挙動が矛盾しない
- AIにとって “学習しやすい世界” を作れる
これらは、AI / ロボット / 産業シミュレーションが求めていた条件 にバシッとはまっているやん!っと思ったのは僕だけかもしれませんが…
そんなふうに見えました。
AI/DT時代の潮流を見る
これら3つの流れから見えるのはこういうことだと、ぼくには思えました。
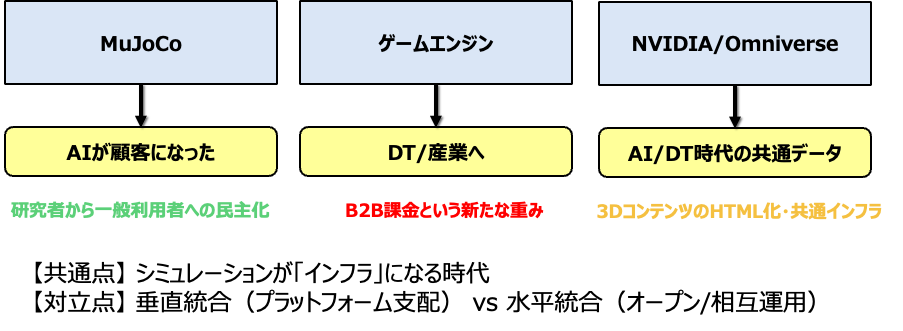
これからの箱庭の立ち位置について
話は長くなりました。
MuJoCo、ゲームエンジン、OpenUSD、これらの動きを追いかけていくと、
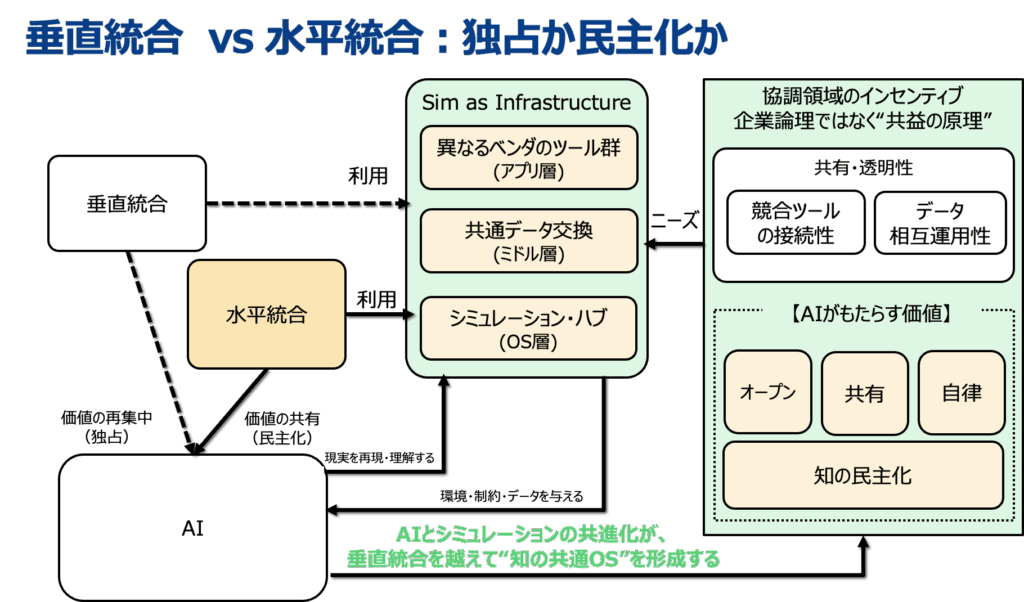
世界のシミュレーションは 垂直統合と水平統合の二つの流れがあるように思えます。
箱庭は、巨大なプラットフォームを目指していません。
むしろその逆で、現場の人が“自分で扱えるサイズ”のシミュレーションをつくり続けたいと思っています。
自分の手で組み替えられて、
自分の意思で動かせて、
自分の現場に合わせて改造できる。
そんな箱庭”を作りたいなーっと、重たいリュックを背負いながら、考えている今日この頃です。
おしまい。
コメントを残す