2025年10月24日(金)
箱庭ラボは、箱庭ドローン・コア機能(hakoniwa-drone-core)v3.4.0 をリリースしました!
今回のアップデートでは、物理エンジン・AI連携・教育連携の3軸で新たな機能を追加し、
教育・研究・実証実験の幅を大きく拡張しています。
v3.3.0からv3.4.0へのアップデート手順は、こちらを参照ください。
🔧 v3.4.0 の新機能・変更点
🧩 MuJoCo 連携機能の追加
箱庭ドローンの物理モデルを MuJoCo 上でシミュレーションできるようになりました。
MuJoCoの高精度な剛体計算と、箱庭ドローンが持つローターダイナミクスを融合し、
よりリアルな物理挙動を再現します。
今回のリリースでは、以下のような機能をサポートしています:
- ⚙️ PID制御パラメータの調整
飛行安定性をチューニングし、制御アルゴリズムを評価可能。 - 🛠️ MJCFモデル(機体構造ファイル)のカスタマイズ
プロペラ配置・重量・慣性パラメータを自由に変更し、
オリジナル機体モデルを作成できます。 - 🎮 キーボード操作+OpenGL描画+WSL2環境での操縦体験
シミュレーション結果をリアルタイムに可視化しながら操作できます。
MuJoCoの MJCFファイルを編集するだけで多様なドローン形状を構築可能 です。
高精度な剛体シミュレーションとPID制御の融合により、これまでにないリアリティを持つ箱庭ドローン体験を実現しました。
詳細は、弊社エンジニアの紹介記事(qiita記事)を参照ください。
👉 デモ動画:
🧠 Gemini 連携機能の追加
箱庭RPCサーバーを通じて Gemini(Google AI) と連携可能になりました。
自然言語でドローン操作や環境設定を行うことができ、教育・展示・研究分野での応用が期待されます。
- 例:「高度を5mに上げて」「左に90度旋回して」などの音声・テキスト命令に対応
- AIモデルとの動的連携を通じて、自然言語による制御実験が可能
詳細は、弊社エンジニアの紹介記事(qiita記事)を参照ください。
👉 デモ動画:
🧱 Scratch 連携機能の追加
教育向けプログラミング環境 Scratch(TurboWarp対応) と連携しました。
Scratchブロックから箱庭RPCサーバーを通じてドローンを制御できます。
- 子どもたちや学生が「飛ばして学べる」STEAM教材として利用可能
- 簡単な設定でRPC通信による遠隔制御が可能
GitHub URL: https://github.com/hakoniwalab/hakoniwa-scratch.git
👉 デモ動画:
🌍 箱庭環境シミュレーション用リポジトリの新設
新たに hakoniwa-envsim リポジトリを公開しました。
風・温度・気圧・GPS強度などの環境データをJSONで定義し、箱庭ドローン内のセンサ/アクチュエータと連携可能です。
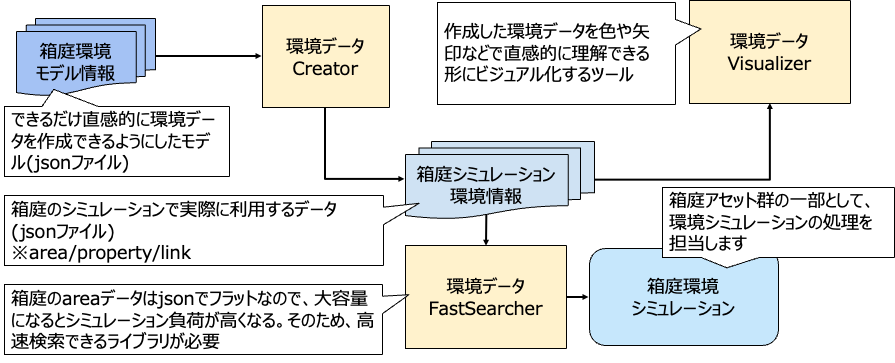
環境データを 「作る」(Creator)、「見る」(Visualizer)、「探す」(FastSearcher)、
そしてそれを 「使う」(シミュレーション) という4つの要素に分けました。
- Creator は、環境を“描くための道具”
- Visualizer は、“見える化して考えるための道具”
- FastSearcher は、“効率的に活用するための道具”
- Simulation は、“それらをつなげて命を吹き込む存在”
本リポジトリの構成:
たとえば、神戸港で風とGPS電波強度の環境データを作成してビジュアライズさせた例はこちらです。
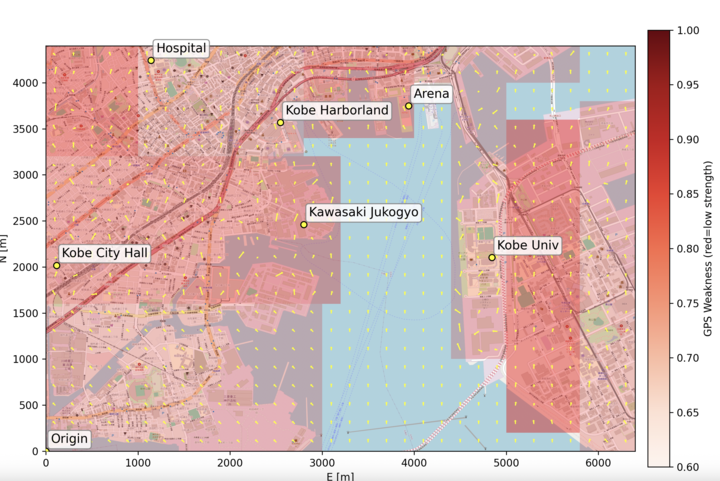
この図の赤い部分はGPS信号が弱くなるエリア。港湾の構造物や高層ビルの陰影が、そのまま電波の“地形”として浮かび上がっています。さらに、黄色の矢印は風の流れを表しています。
そして、こちらが、ArduPilotで飛行させ、Unreal上でその様子を可視化したものです。
GitHub URL: https://github.com/hakoniwalab/hakoniwa-envsim
💼 箱庭ドローンPROユーザ向けアップデート
箱庭ドローンPROユーザ向けに、運用性と拡張性を強化するアップデートを行いました。
研究・教育・社会実証などの現場で、より柔軟に運用できる環境を整備しています。
- 🧱 ビルド済みPROバイナリを Dockerコンテナ内で利用可能に
従来のホスト依存を解消し、コンテナ上での一括動作が可能になりました。
セットアップ時間を短縮し、チームや研究機関での共有・再現性を向上させます。 - 🌍 環境シミュレーションデータを センサ/アクチュエータPDU として利用可能に
hakoniwa-envsimの生成データを直接ドローンシミュレータに連携できるようになりました。
温度・風速・GPS強度などの外部環境が、リアルタイムに機体挙動へ反映されます。
これにより、物理・制御・環境を統合した「実機同等の検証環境」を
箱庭ドローンPROで手軽に再現できるようになりました。
合同会社 箱庭ラボ 担当:森崇
コメントを残す