こんにちは。お、気づけば、明日から3連休じゃないですか!
ぼくは、この3連休、町内の友達と昼飲みしながら、バカ話するのを目標に生きてきました。
技術のことでも仕事のことでもなく、ただ、くだらない話をしたいだけ。
ドローンは飛ばしません、缶ビールだけ飛ばします。
しみじみ
昨日、箱庭ドローンシミュレーターのv3.3.0のリリースを終え、僕の中で、ちょっと「やってやった感」が出ました。
なんせ、複数機体の同時シミュレーションをPX4でもArdupilotでも独自制御でも、同じPython APIでできちゃう。
さらに、ログリプレイも複数機体対応しちゃっているのです。
きっと誰も気付かないだろなーって思いながら、でもでも、技術者として、「すごい」って勝手に盛り上がっているだけ。
思い返せば、牧野さんから「ドローンシミュレータ作ろう」と声をかけられて火がつき、泥沼の開発をしながらそのまま万博へ突入。そして「箱庭ドローンPRO」なんてものができて、暑い夏の中は PRO の機能拡張と品質改善に四苦八苦。
ようやく落ち着いたのが今回の v3.3.0 なのです。
箱庭ドローンシミュレータについて
ここで話を転じて、「箱庭ドローンシミュレータ」について語りたいと思います。
実は、あんまり知られてないのですが、「ドローンシミュレータ」で検索するとですね、「ドローン操縦訓練シミュレータ」が沢山でてくるのですが、箱庭のように、PX4/Ardupilot・2大巨頭サポート、Unity/Unreal対応、複数ドローン対応、MCPサーバー連携やったり、デジタルツイン連携やったり、MuJoCo連携やったり、Quest3使ったAR連携やったりするのを、同じ仕組みの中でできるドローンシミュレータは、あんまりないんですよねぇ。
もし、お疑いのお気持ちありましたら、ぜひググってください。
ちなみに、真面目なAIくんに相談したら、こんな感じで評価結果が出てきました。
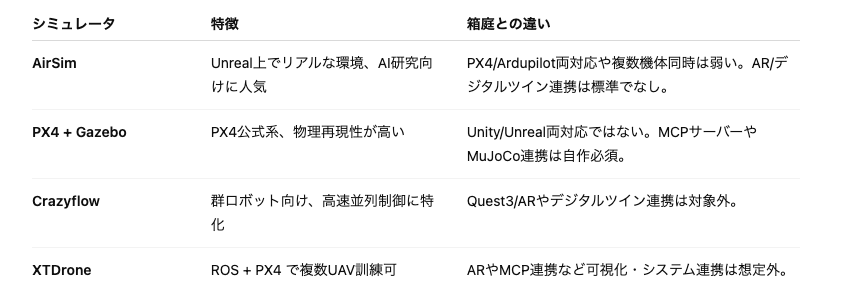
なんでか?
で、ふと、「なんで、箱庭ドローンシミュレータは、こんな色々やってんだろう?」って思うわけです。
普通のプロダクト開発ですと、まずマーケット調べますよね。次に、ターゲット絞って、コスパ見て、開発費用を捻出。そこから、エンジニア雇って、プロマネ雇って、開発、そしてリリースの流れだと思われます。
振り返って、「箱庭ラボはどうか?」と。
- マーケット調査?してません。
- ターゲット絞り?気づいたら自分がターゲットでした。
- コスパ?無視です。だって一人でやってるから。
- エンジニア?プロマネ?──全部ぼく。
要するに、最初から「普通の開発プロセス」なんてなかった。
ただ「やりたい」「必要だ」「面白い」という衝動が先にあって、その延長でMCPも、デジタルツインも、MuJoCoも、Quest3 ARも、ぜんぶ巻き込んで、なんなら平鍋さんは物理エンジンの実装までやってくれていた。と。
だから箱庭は、マーケットインではなく、衝動インで生まれたシミュレータなのだと思います。
でも、その実力のほどは?
箱庭ドローンシミュレータは、少数精鋭(開発者は2人)でやってます。
モチベーションは、「やりたいからやる」それだけです。
でも、その実力って、客観的にどうなの?って気になりますよね。
で、箱庭ドローンPROの評価を、Gemini、Claude、ChatGPTと自分とで評価軸を決めて、比較しました。
その結果がこちらです。
https://github.com/toppers/hakoniwa-drone-core/blob/main/docs/evaluation/results.md
意図していたかどうかはわかりませんが、「できる/できない」という判断(できることの深さではありません)だけで言うと、世界レベルのOSSと比肩しえるものができちゃっていたのです。
これって、すごくないですか
いやいや、世界レベルなんて言うと自分で笑っちゃいますけど、
AIくんたちがそう評価してるんだから仕方ないですよね(笑)。
最後に
あー、ごめんなさい、大袈裟なことを言ったかもしれません。
世界レベル? いや、缶ビールレベルで充分です。
3連休楽しみましょう!
おしまい。
コメントを残す