2025年9月11日(木)
箱庭ラボは、箱庭ドローン・コア機能(hakoniwa-drone-core)v3.3.0 をリリースしました!
今回のアップデートでは、教育・研究・実証実験の幅をさらに広げる3つの機能を追加しています。
主な新機能
- 複数機体の同時シミュレーション
隊列飛行や協調制御の検証が可能に。 - PX4 / Ardupilot 連携 Python API
SITLと直結し、実機制御に近い条件でプログラミング可能。 - ログリプレイ機能
飛行ログを再生し、事後解析やデバッグに活用可能。
👉 バイナリの入手はこちら:https://github.com/toppers/hakoniwa-drone-core/releases/tag/v3.3.0
複数機体の同時シミュレーション
箱庭ドローンシミュレータは、複数のドローン機体を同時にシミュレーションする機能を提供します。
複数の機体を用いた隊列飛行の検証など、より高度なシナリオのシミュレーションが可能です。
複数機体のシミュレーションは、以下のフライトコントローラに対応しています。
- Ardupilot
- PX4
- 箱庭ドローン操作用 Python API での制御
設定ファイルでインスタンス数を指定することで、2機にとどまらず N 機体の同時シミュレーションも可能です。
※ 実行可能な台数はマシンの性能に左右されます。
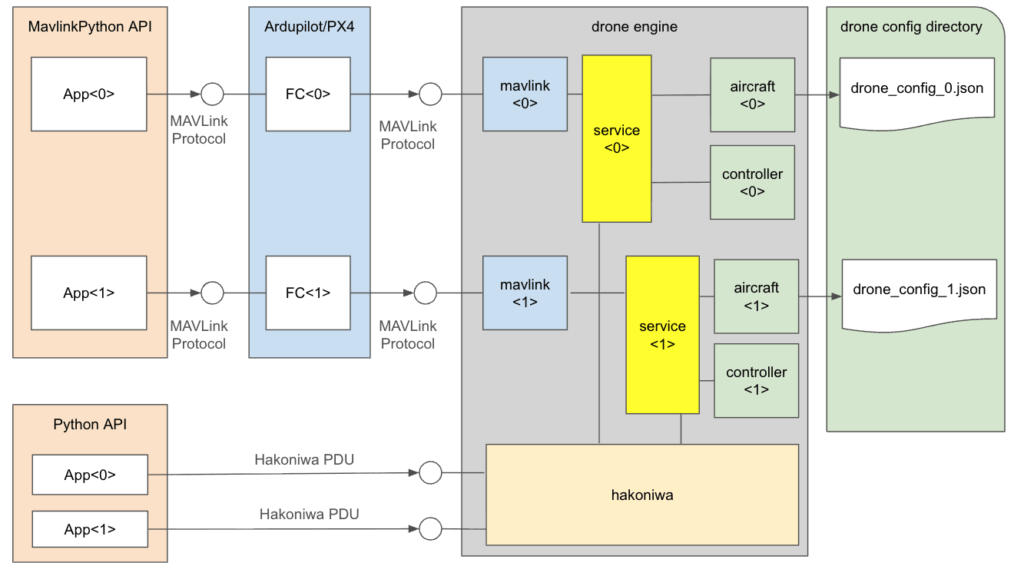
以下の図は、複数機体シミュレーションにおける構成を示しています。
- 各機体には対応する
drone_config_x.jsonが存在し、aircraft と controller の設定を定義します。 - MAVLink経由の制御では、各ドローンごとに FCU (Ardupilot/PX4) インスタンスを起動し、 Python クライアントは MAVLink ポートを通じて個別に接続します。
- Hakoniwa PDU経由の制御では、Python クライアントが直接 PDU を介して 各ドローンインスタンスを制御します。
詳細は こちら をご覧ください。
PX4 / Ardupilot 連携 Python API
これまでの Python API は、箱庭内部のコントローラを対象とした操作のみをサポートしていました。
今回のリリースでは、新たに PX4 / Ardupilot SITL と連携可能な Python API を提供します。
pymavlinkを利用し、PX4 / Ardupilot の SITL と直接通信- モードやコマンドの違いを吸収し、同一のAPI呼び出しで操作可能
- 複数機体や、PX4とArdupilotの混在環境での制御にも対応
詳細は こちら をご覧ください。
ログリプレイ機能
箱庭ドローンシミュレーションを実行すると、自動的に飛行ログ(dron_log<index>/drone_dynamics.csv)が記録されていました。
今回、この飛行ログを再生するログリプレイ機能を新たに開発しました。
この機能により、過去のシミュレーション飛行を再現し、詳細な分析やデバッグを行うことが可能です。
主な特徴:
- シミュレーションの再現: ログデータに基づき、ドローンの動きを忠実に再現します。
- 再生制御: 再生範囲の指定や、将来的には再生速度の変更(スロー再生など)が可能になります。
- 透過的な切り替え: ビジュアル機能とのインタフェースは通常のシミュレーションと同じインターフェース(PDU)を利用するため、可視化環境(Unity/Unreal)などをそのまま利用してリプレイを確認できます。
詳細は こちら をご覧ください。
合同会社 箱庭ラボ 担当:森崇
コメントを残す