箱庭ラボでは、シミュレーション技術を軸にした開発・研究に取り組む一方で、そのノウハウを外部にも発信しています。
このたび、弊社エンジニアによる最新の技術記事が3本、QiitaおよびZennにて公開されましたのでご紹介いたします。
どれも実践に役立つ内容ですので、ぜひご覧ください。
① PX4 SITLをWindowsで爆速セットアップ
国産シミュレータ「箱庭」でラクに可視化・制御する方法
▶️ 記事を読む
「PX4を試したいけど、環境構築が地獄…」そんな悩みに応える記事です。
WSLとUnityを活用して、PX4のSITL(Software In The Loop)をWindows環境でもサクッと動かす手順を丁寧に解説。
箱庭シミュレータとの接続方法も網羅されており、これから始めたい方にとって最良のガイドとなるはずです。
✅ 実践者視点の工夫が光る、読みごたえのある内容!
② ArduPilot SITLをWindowsで爆速セットアップ
国産シミュレータ「箱庭」でラクに可視化・制御する方法
▶️ 記事を読む
こちらはArduPilot編。PX4同様、構築の手間が大きな障壁となるSITL環境を、Windows+WSLで快適に整える方法を解説しています。
UDP通信の設定や、Hakoniwaとのシームレスな連携にも触れており、開発・可視化・テストの効率化に直結するノウハウが詰まっています。
✅ 社内でも「これは助かる!」と声のあがった記事。
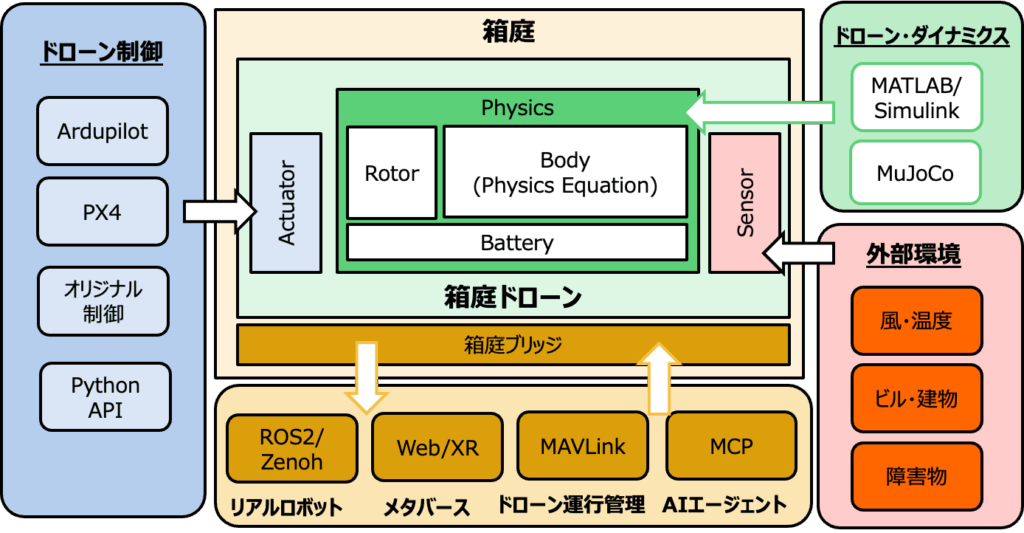
③ 国産シミュレータ箱庭の思想と仕組み
〜 PX4/ArduPilot対応を支えるアーキテクチャ解説 〜
▶️ 記事を読む
最後は思想と構造に迫る解説記事。
単なる技術の紹介ではなく、「なぜ箱庭はこの設計にしたのか?」という背景にある哲学や戦略的意図にまで踏み込んだ内容です。
技術選定の理由やPDUによる抽象化思想など、今後のドローン開発・シミュレーション設計のヒントが得られる一編です。
✅ 開発者本人の視点で書かれた、箱庭の「設計思想」への招待状。
📣 最後に
これらの記事はいずれも、現場の開発を通じて培われた知見をもとに、
「誰かの困りごとを少しでも減らせたら」という想いから生まれたものです。
記事を執筆したエンジニアの行動力と技術力に、改めて敬意を表します。
そして今後も箱庭ラボでは、実践的かつ先進的な情報発信を続けてまいります。
コメントを残す