2024年5月4日(木)、「箱庭ドローン・シミュレータ」v2.3.0のリリースをお知らせいたします。
最新のアップデートの詳細は、GitHubでご確認いただけます。:hakoniwa-px4sim
一連のバージョンアップの目玉は、PX4及びQGCを使わずに、箱庭ドローンの Python API を使って様々な機体のコントロールができるようになった点です!
v2.2.0では、PS4コントローラをパソコンにUSB接続し、箱庭ドローンを操作できるようになりました。ゲーム感覚で、箱庭ドローンを楽しむことができます!
v2.3.0では、Python APIの機能が大幅に拡張され、以下の新機能が追加されました。
- 3D LiDARのAPI:より詳細な環境データの取得が可能に。
- カメラのAPI:Unity環境内での観測を実現。
- 荷物搬入用のAPI:ロジスティック操作がシミュレーション可能に。
上記API機能拡張に伴い、箱庭ドローンの形状が下図のように拡張れました。
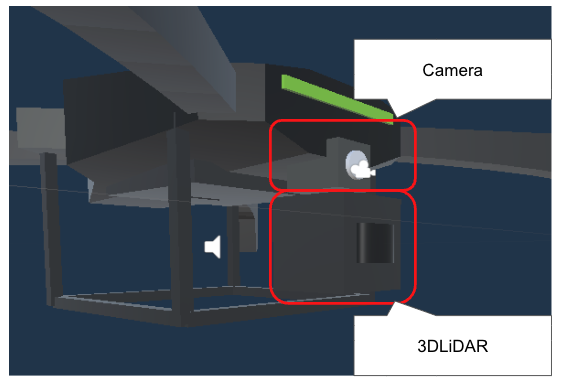
Cameraは、ドローンの前方に装着しています。Python APIで、必要なタイミングでカメラ撮影が可能です。この機能を利用することで、ドローン監視機能の実装が可能となります。また、本APIを連続呼び出しすることで、リアルタイムカメラとしても利用可能であり、OpenCVと連携することで動画録画機能の実装も可能になります。
カメラ直下には、3DLiDARが配置されています。3DLiDARは、リアルタイムにPointCloudデータを生成し、Python API を使って、任意のタイミングで取得できます。この機能を利用することで、障害物回避などで使うことができます。なお、3DLiDARは、drone_config.jsonファイルでパラメータ指定することが可能です。3DLiDARの配置場所や角度、さらには、垂直方向、水平方向のビュー幅やサンプリングレートを調整できます。詳細はこちら。
なお、drone_config.json ファイルでは、ドローンのプロペラ音源を指定できるようにしもしました。audio_rotor_pathに、音源を指定することで、リアルなドローン体験が可能になります!
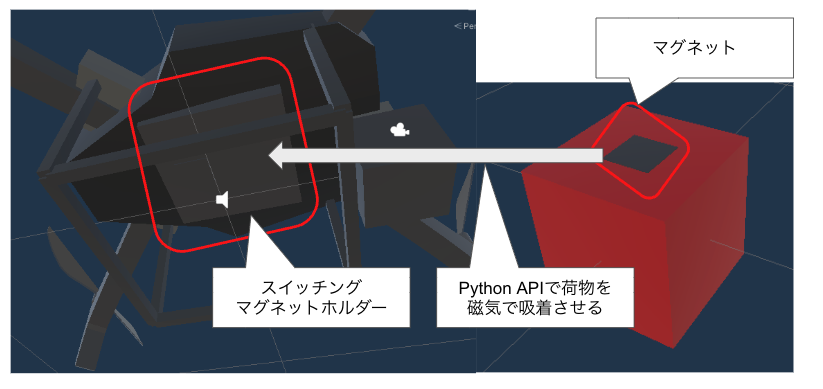
荷物の搬送のために、荷物オブジェクトを追加しました。荷物の頭部にはマグネットをつけています。一方、箱庭ドローン側には、スイッチングネットホルダー機能をつけています。Python APIで、1m以下にいるマグネットを吸引し、マグネットホルダーで固定し、荷物運搬を可能にしています。
論より証拠、これら全ての機能をお試しできるサンプルプログラムはこちらで公開しています。また、その実行風景を以下で公開しています。
引き続き、箱庭ラボは皆様からの貴重なフィードバックを基に、より実用的なシミュレーション環境の提供を目指して参ります。今後ともご支援のほどよろしくお願い申し上げます。
合同会社 箱庭ラボ 担当:森崇
コメントを残す