8/31-9/1 にかけて、毎年恒例の SWEST25 に参加させていただきました。とっても楽しい時間を過ごすことができました。
というわけで、今回は、SWESTで発表してきた箱庭の内容と、自分が感じるSWESTの良さについて語ってみたいと思います。
箱庭の発表内容
チェンジビジョンの久保秋さんと一緒に、「複数ロボットシミュレーションのSTAMP/STPAでの活用― STAMP/STPA本の題材を箱庭で実験してみた」というタイトルで、実機と箱庭で作成したシミュレーション環境を紹介してきました(下図)。箱庭合宿でご紹介した内容です。

当初は、STAMP/STPA分析段階で手軽に試せる環境として、箱庭の可能性を示すことが目的でした。
しかし…、ご覧の通り実機のスペースが大半を占めており、会場では実機の方がとっても目立っておりました…。(^^;
とはいえ、箱庭の良さをしっかり伝えるためにもインタラクティブセッションでは熱く語ってまいりました。
ご来場いただきました方々には大変感謝いたします。
箱庭は、手軽にシミュレーションできることを目的としたシミュレーション・プラットフォームを目指しております。
その題材として、「踏切制御システムも簡単に作れます」というキャッチフレーズでお話ししてきました。
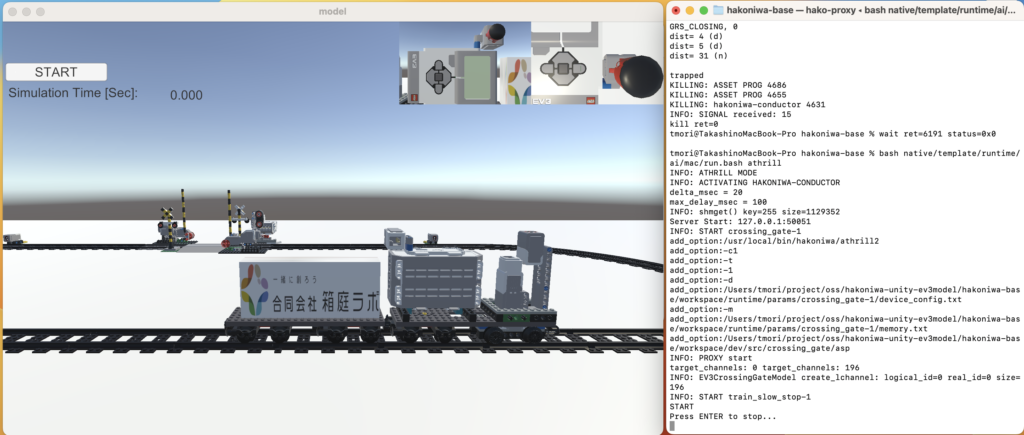
今回のシミュレーション構成は下図の通りで、マイコン上で動作するプログラムをそのまま箱庭で動かして、Unity上で動作確認ができるという代物です。
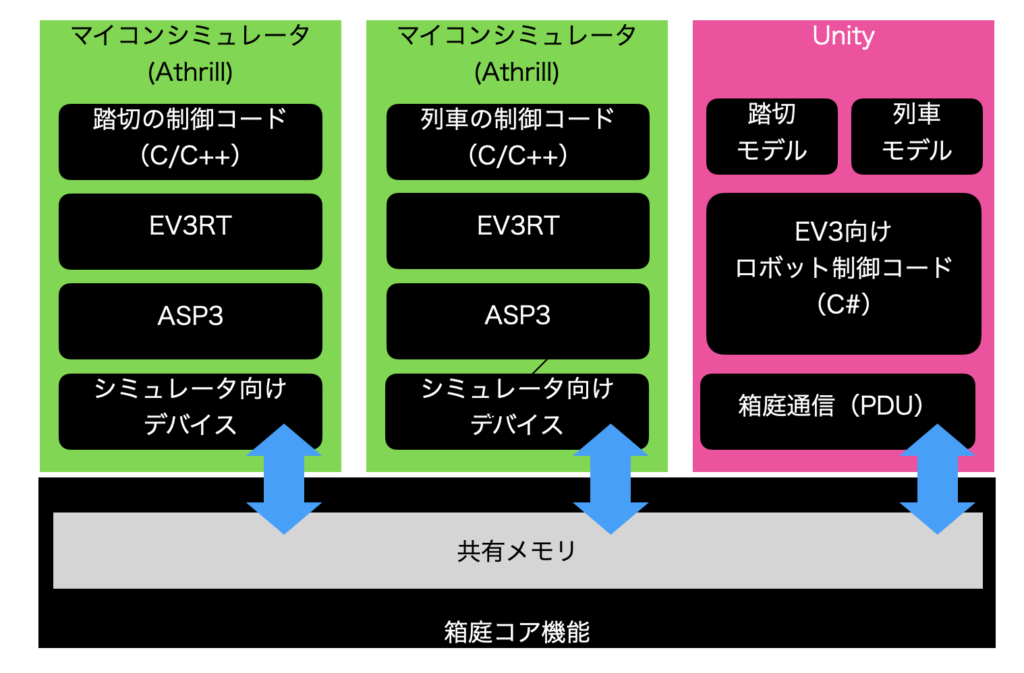
このシミュレーション環境の特徴的な点は以下になります。
- 複数のマイコン制御プログラムを同時にシミュレーションできる(下図:右側)
- 被制御対象であるEV3ロボット(踏切と列車)をUnity上で物理シミュレーションできる(下図:左側)
- マイコン側とUnity側のシミュレーションの時間同期ができている
そして、今回ご紹介したシミュレーション環境は、TOPPERSライセンスのオープンソースとして、以下で一般公開されております
(現時点ではAppleSilicon向けのMacで動作確認済みです)。
https://github.com/toppers/hakoniwa-unity-ev3model
興味のある方、是非お試してください!!
自分が感じるSWESTの良さについて
今回、自分がSWESTに参加するにあたり、インタラクティブセッション/セッション参加以外にいくつかやりたいことがありました。
1つ目は、数年前のSWESTで色々とメンタル面でのご助言いただいた酒井さんともう一度、直接会ってお話しすること。
2つ目は、箱庭WGメンバと夢を語り合うこと。
3つ目は、まだお会いする機会がなかった方にも箱庭とか自分がやってきた技術・経験など語り合うこと。
これらは、全部、夜の分科会で達成できました(いやー楽しかったです)。
SWESTでは、様々な企業・大学・団体の方が、それぞれ自分について語りたい熱い人が、めちゃくちゃたくさん来られておられます。
そんなお方達が下呂温泉で一同に集まって、職場ではなかなか話せないことを相談したり、技術的なアドバイスもらえたり、別の視点からの新しい気づきが得られたりもするわけです。
「所属している企業・大学・団体の垣根を超えて、コミュニティの中でエンジニアが繋がって熱く語りあう場所 SWEST!」
そんな風に自分はSWESTの良さを感じています。
来年は、箱庭の発表できるように頑張ります!!
おまけ
インタクティブセッションではお見せできませんでしたが、信号モデルも追加して動かすことができるようになりましたので、共有します。
コメントを残す