昨日、牧野さんのリポジトリで 最新のリリース が出ていました。
(牧野さんのことを詳しく知りたい方は、こちらのブログを参照ください)
そして――
なんと!
Windows版の箱庭・インストーラが公開されていたのです! 🎉
🔗 どこにある?
リリース場所はこちらです👇
👉https://github.com/buildko89/appsinstaller/releases/tag/v1.0.1
💿 インストーラって、どんなもの?
内訳としては、大きく分けて以下の2つに分かれています。
それぞれ、setup.exe が用意されており、ダウンロード→解凍→管理者として実行
するだけでインストールできます。
💡 事前に必要なもの
以下の環境は、あらかじめ準備しておきましょう。
(手順書も丁寧に用意されていました!)
🧭 インストール体験してみました!
今回、箱庭ラボのWindows開発マシンには
RAM Diskおよび Python 環境がすでに入っていましたので、
前提インストールはスキップして進めました。
① 箱庭コア機能のインストール
リリースページ:
👉https://github.com/buildko89/coreinstaller/releases/tag/v1.0.1
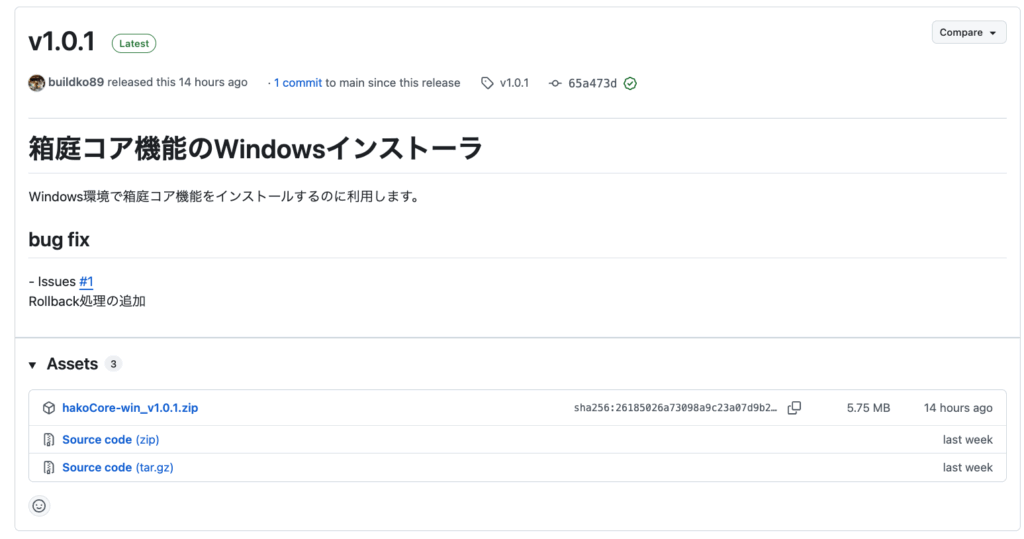
hakoCore-win_v1.0.1.zip をダウンロードして解凍すると、setup.exe ファイルが見えます。
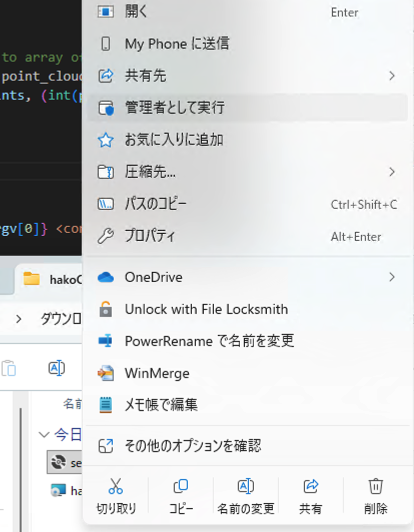
setup.exe を右クリックし、管理者として実行 をクリックすると、インストールが始まります。
しばし待つと、2つのダイアログが表示されました。
それぞれ OK → 閉じる をクリックで完了!
② 箱庭ドローンシミュレータのインストール
リリースページ:
👉https://github.com/buildko89/appsinstaller/releases/tag/v1.0.1

hakoApps-win_v1.0.1.zip を解凍 → setup.exe を 管理者として実行。
しばし、待ちましょう。
完了すると、デスクトップ上に hakoApps-win フォルダが作成されていました。
中を見ると、WinAppsAPI.exe が!
どうやらこれが、箱庭ドローンシミュレータの起動アプリのようです。
⚙️ 設定ファイルの確認
さらに、インストールフォルダを開く というショートカットを開くと、
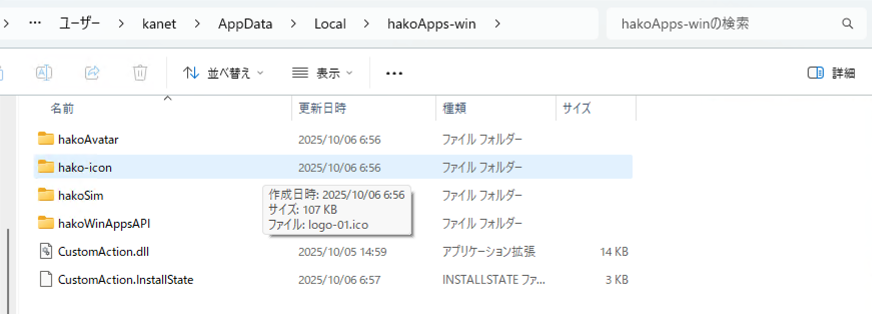
インストールされたファイルが見えます。
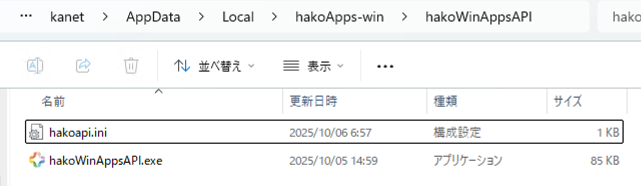
hakoWinAppsAPI フォルダ内の hakoapi.ini には、
各種パス設定が定義されていました。
[hakoWinAppsAPI]
HakoWinPath=C:\Users\kanet\AppData\Local\hakoApps-win\hakosim\bin
HakoConfPath=.\config\drone\api-1
HakoAvatarApp=C:\Users\kanet\AppData\Local\hakoApps-win\hakoAvatar
HakoAvatarConf=....\hakoAvatar\avatar-drone.json
HakoPyPath=C:\Users\kanet\AppData\Local\hakoApps-win\hakosim\bin\drone_api\rc
HakoPyConf=C:\Users\buildman\AppData\Local\hakoApps-win\hakosim\bin\config\pdudef\webavatar.json
mmapDir=Z:\mmap
ZeroFilePath=Z:\mmap\mmap-0x100.bin
ZeroFileSizeMB=5
補足:
ここで一点だけ気づきが。HakoPyConf のパスに 牧野さんのアカウント名(buildman) が残っていたため、
自分のユーザ名(kanet)に修正したところ、正常に動作しました! 🎉
この件は牧野さんにも報告済みで、次のバージョンでは修正版が反映される予定です。
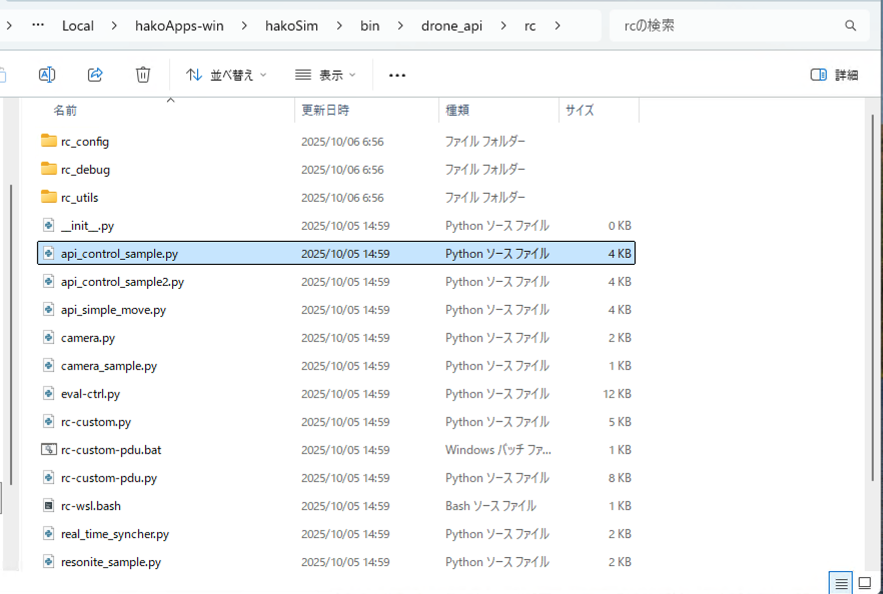
また、箱庭ドローンを遠隔操作するプログラムは、hakoApss-win/hakoSim/bin/drone_api/rc 配下に色々とありました。今回は、api_control_sample.pyを試してみましょう。
🚀 シミュレーションを実行してみよう
WinAppsAPI.exe をダブルクリックすると、
以下のウィンドウが立ち上がります。
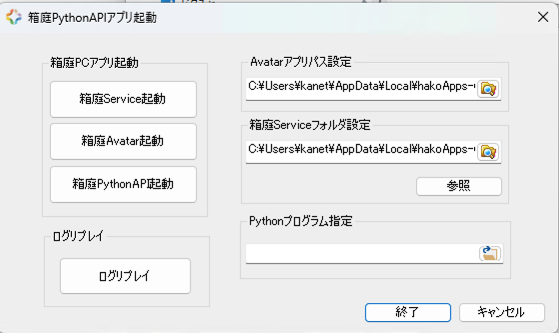
左上のロゴ……そう、箱庭ラボのロゴ!
かっこいいー。
▶ 箱庭Service起動
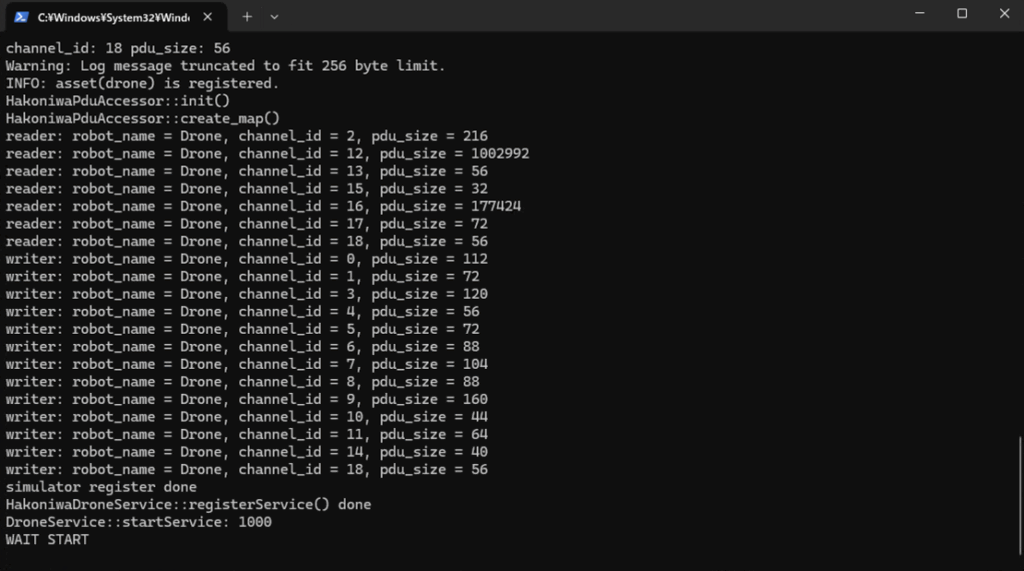
早速、箱庭Service起動 ボタンをクリックすると、コンソールが現れ、WAIT START で待ち状態になっていることを確認できます。
▶ 箱庭Avatar起動
次に、箱庭Avatar起動 ボタンをクリックすると、Unity アプリが起動し、START で待ち状態になっていることを確認できます。
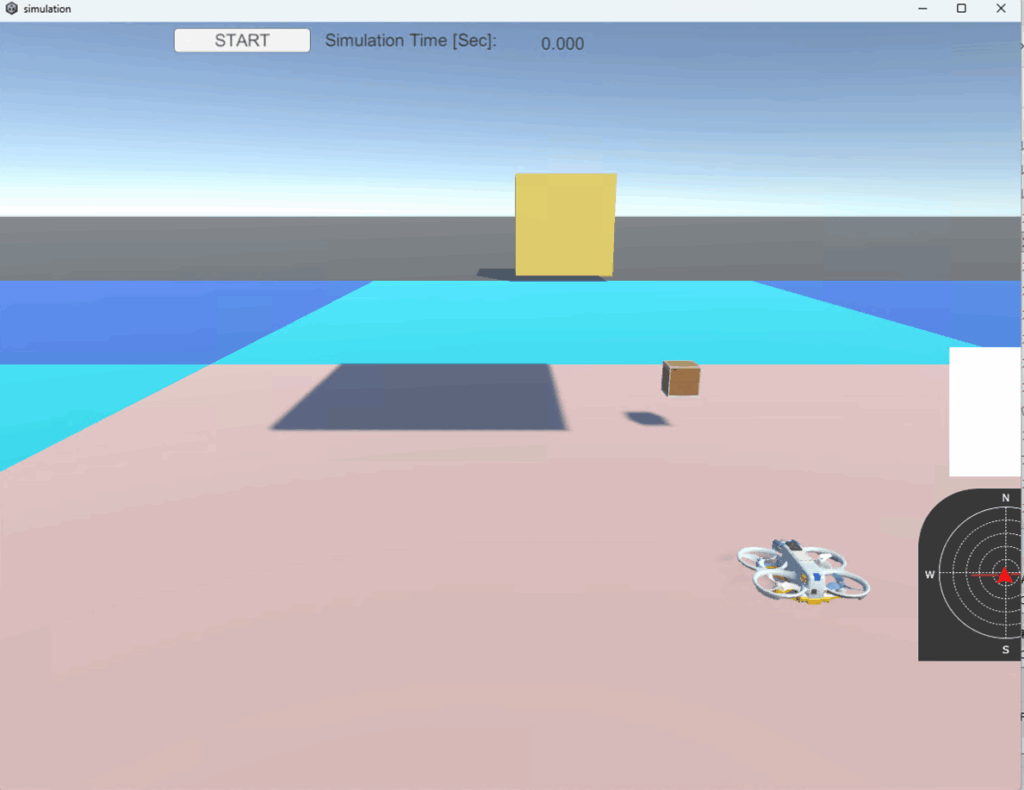
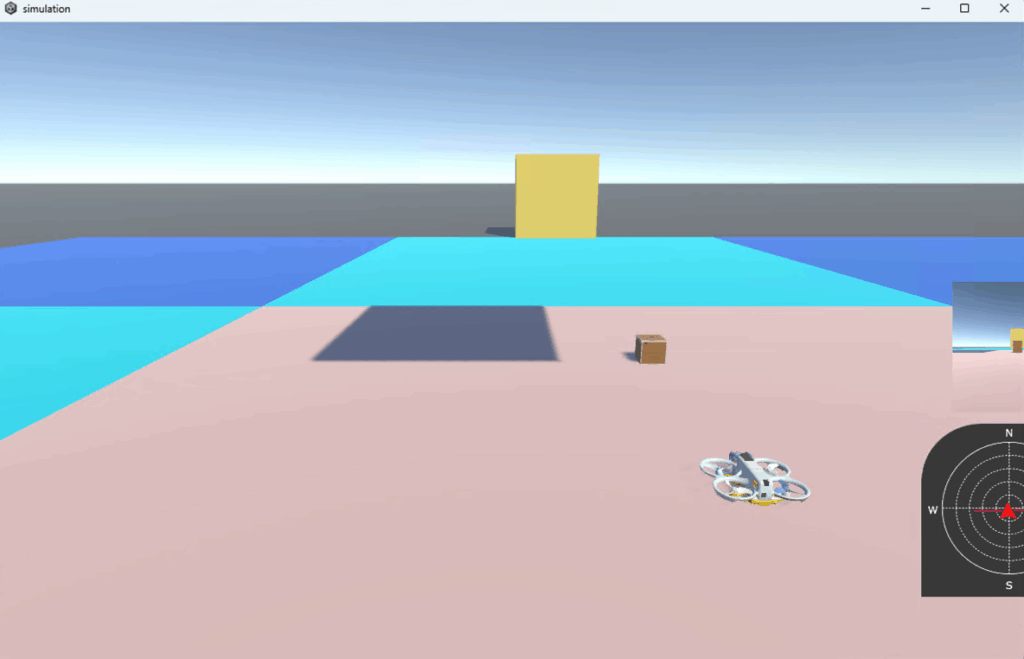
そのまま、START ボタンをクリックすると、シミュレーション開始し、Simulation Time がカウントアップされていきます。
補足:START ボタンが見えないケースもあるようで、その場合は、Windowの縦幅を大きくすることでSTART ボタンが現れるようになりました。
🐍 Pythonプログラムを指定してみる
このままでは、ドローン動きませんので、Pythonプログラムを指定しましょう。対象のプログラムは、先にお見せしたapi_control_sample.py です!
指定終わったら、箱庭PythonAPI起動 ボタンをクリックしましょう。
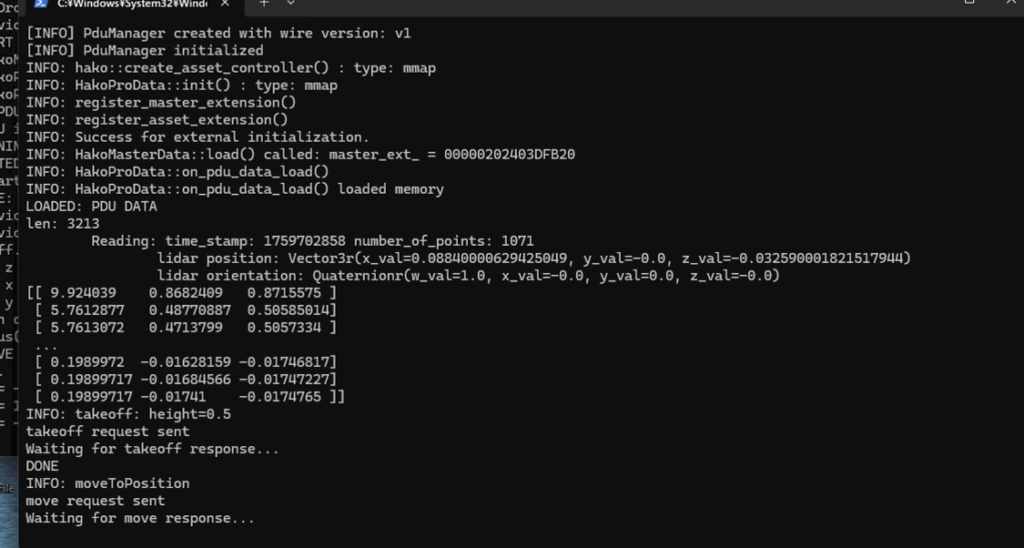
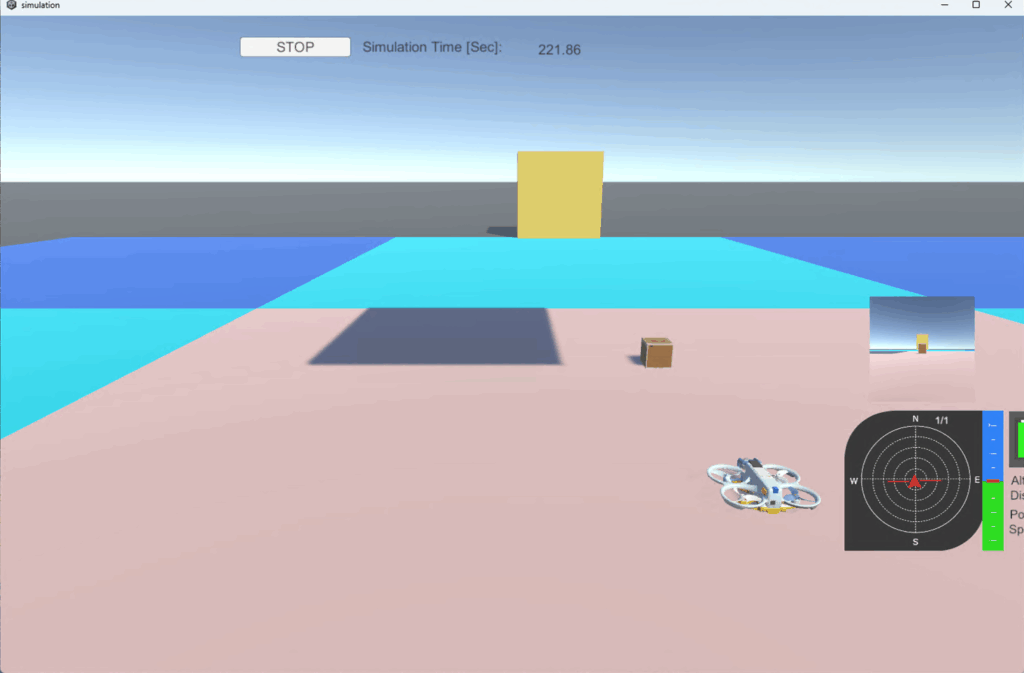
すると、このように、ログが出力され始め、ドローンが動き出します!素晴らしい!!
🎬 デモ
最後に、実際のシミュレーション実行の様子をデモ動画としてお見せします。
🏁 まとめ
Windows環境でも、いよいよ箱庭が動き出しました。
細部まで作り込まれており、ちょっとした修正でしっかり動作します。
やる気のある人なら、すぐに試したくなる内容です。
(文・森 崇)
コメントを残す