2025年8月16日(土)
箱庭ラボは、箱庭ドローン・コア機能(hakoniwa-drone-core)v3.2.1 をリリースしました!
今回のアップデートで、箱庭ドローンシミュレータは リアルタイム性と開発効率が大幅に向上 しました。
そのカギを握るものが 箱庭コア機能 です。
箱庭ドローンシミュレータにおける箱庭コア機能の位置づけ
箱庭コア機能 は、箱庭ドローンシミュレータの「心臓部」にあたる基盤ソフトウェアです。
PDU(Platform Data Unit)と呼ばれる高速・軽量なバイナリ通信方式を用いて、物理シミュレーション、センサー、制御ロジックなど複数のコンポーネントをリアルタイムで連携させます。
ドローンシミュレータでは、
- 飛行制御
- カメラ・LiDAR・GPSなどのセンサー情報取得
- 外部環境とのデータ交換
といったあらゆる通信処理を、このコア機能が担っています。
つまり、コア機能の進化はシミュレータ全体の性能や開発効率に直結します。
箱庭コア機能の新版開発の背景
これまで、箱庭コア機能は 旧版を利用してきました。
しかし、旧版はメンテナンス性や拡張性に課題が多く、将来の機能追加に制約がありました。
そこで、箱庭ラボは2025年4月から 新版 の開発に着手しました。
そして、この度、旧版との互換性を保ちながら、不具合修正と機能強化を実施し、箱庭ドローンシミュレータへの組み込みに成功しました。
新版箱庭コアの追加機能内容
- データ受信イベント機能
PDUデータ受信をリアルタイムで通知し、必要な処理を即時実行可能にします。
たとえば、あるアセットがデータを書き込んだ瞬間に、別アセットが自動的にデータ受信できます! - RPCサービス機能
従来はトピック通信で行っていた要求/応答処理を、関数呼び出し感覚で実現。
データ受信イベントを基盤に、サービス要求を受けた時点で処理実行できます。
これにより、離陸や移動などのコマンドをよりシンプルかつ効率的に実装可能。
たとえば、外部アプリから1行の呼び出しでドローンの動作を制御できるようになります! - Debian パッケージでの提供開始
新版の箱庭コアでは、その機能をより手軽に利用できるよう、OS標準パッケージとしてのリリースを目指しています。
今回、第一弾として、Ubuntu 環境でaptによるインストールが可能になりました。
これにより、Docker を使わず直接環境に導入したい方も、シンプルなコマンドでセットアップできます。- インストール方法と利用手順はこちら → [手順ページへのリンク]
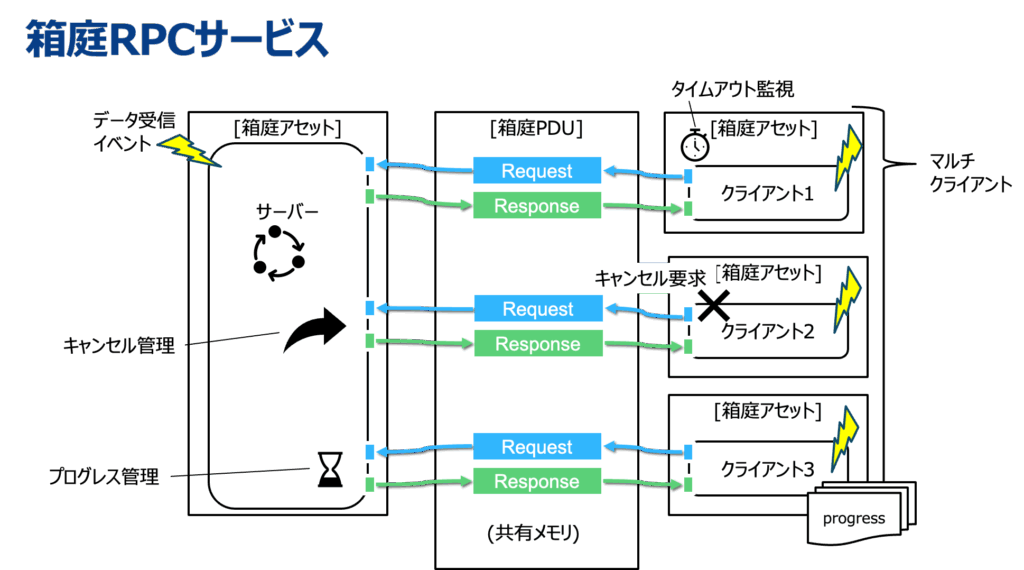
(箱庭RPCサービスのアーキテクチャ)
効果と期待
新版箱庭コアの導入により、
- 通信処理の設計・実装が簡素化
- 高速なイベント駆動型アプリケーション開発が可能
- 将来的な機能追加や拡張に柔軟対応
- AIエージェント/MCPサーバー連携が容易になります
が実現します。
これらは、ドローンのリアルタイム制御や複雑な連携処理、外部システムとの統合をさらに加速させます。
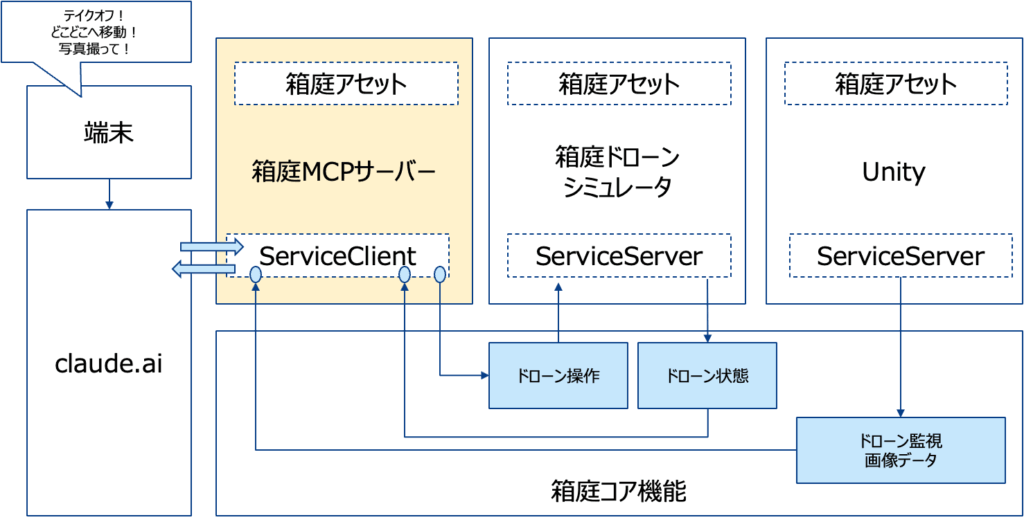
(箱庭RPCサーバーを利用したMCPサーバーのアーキテクチャ例)
新版箱庭コア機能のアップデート手順
新版の箱庭コア機能を適用するには、以下のアップデートが必要となります。
- 箱庭ドローンシミュレータのライブラリおよび実行バイナリの更新
- 箱庭のUnityパッケージの更新
- 箱庭ドローンシミュレータの docker イメージの更新
箱庭ドローンシミュレータのライブラリおよび実行バイナリの更新
箱庭ドローンシミュレータのライブラリおよび実行バイナリを直接利用されている場合は、以下からダウンロードしてアップデートください。
https://github.com/toppers/hakoniwa-drone-core/releases/tag/v3.2.1
- Linux向け:lnx.zip
- Mac向け:mac.zip
- Windows向け:win.zip
箱庭のUnityパッケージの更新
箱庭のUnity Droneにインストールされているパッケージのアップデートが必要となります。
アップデート手順は以下の通りです。
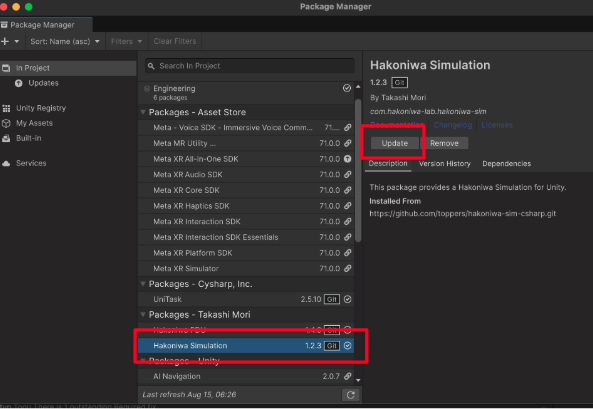
まず、Unity Editor で Package Managerを開いてください。

次に、Hakoniwa Simulation を選択し、Update を押下してください。新バージョンは、2.1.0 です。
箱庭ドローンシミュレータの docker イメージの更新
箱庭ドローンシミュレータのコンテナパターンを利用されている場合は、docker イメージのアップデートが必要となります。
更新手順は以下の通りです。
- WSL2で、docker の起動
bash docker/wsl-docker-activate.bash
- docker イメージの更新
bash docker/pull-image.bash- バージョン:
toppersjp/hakoniwa-drone-core:v2.2.0
合同会社 箱庭ラボ 担当:森崇
コメントを残す