2024年8月7日(水)、「箱庭ドローン・シミュレータ」v2.6.0のリリースをお知らせいたします。
最新のアップデートの詳細は、GitHubでご確認いただけます:hakoniwa-px4sim
今回の機能アップデートの主な特徴:
- Ubuntu 22.0.4の正式対応
- ログリプレイ機能の追加
- ドローン制御プログラムの評価ツールの追加
Ubuntu 22.0.4の正式対応
箱庭ドローンシミュレータは、posix準拠のOS上で動作するように設計されています。そのため、MacだけでなくLinux上でも動作できますが、公式サポートはMacのみでした。
この度、Ubuntuサポートの要望を受けて、Ubuntu22.0.4でのサポートを公式に行うこととしました。
ログリプレイ機能の追加
箱庭ドローンシミュレータでは、機体毎にログを記録しています。このログ情報を利用して、機体の飛行軌跡をリプレイすることができるようになりました!
本機能は、以下の用途で有用な機能でありますので、箱庭ドローンシミュレータのコア機能として組み込むこととしました(11番目の新しいフィーチャーです)。
- ドローン制御検証結果をビジュアライズしたい
- ドローン操縦結果をリプレイしたい
ドローン制御プログラムの評価ツールの追加
箱庭ドローンシミュレータは、Python API を利用して、ドローンを飛行させることができます。 このドローン飛行において、機体の位置や速度制御は箱庭内部の制御プログラムがその役割をになっています。
機体制御の設計は下図のとおりです。
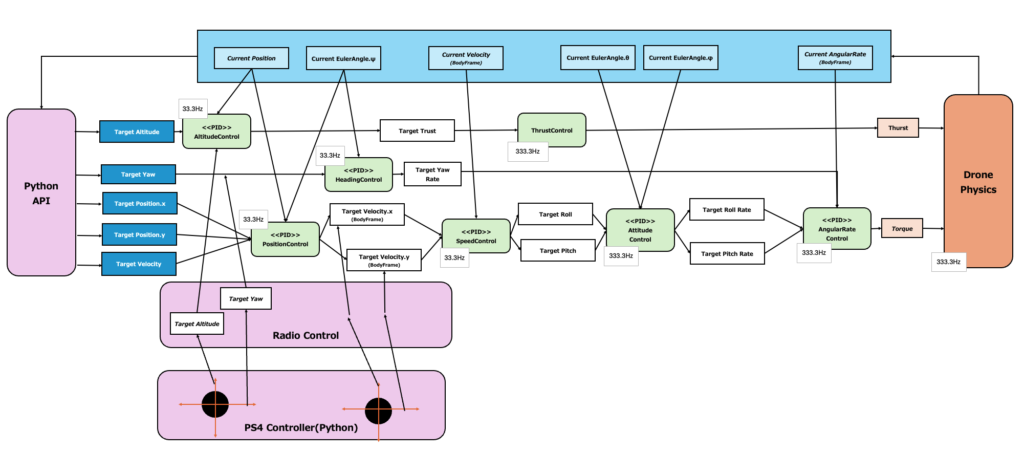
この制御プログラムを誰でも手軽に評価できるように評価ツールの整備を行いました。この成果は将来的に、ドローン制御工学を学ぶ学生さん向けに利用していただけるようにしていきたいと考えています。
本評価ツールを利用すると、機体を3mまで離陸させた後、機体制御プログラムに対して外部入力を与えて、目標値に追従できるかどうかを1コマンドを叩くだけで評価できるようになります。
評価結果は、以下のように、立ち上がり時間やオーバーシュート量が定量化されて表示されます。
OK c(Steady state value) : 10.001 (Target: 10±0.100 m)
OK T_r(Rise time) : 0.348 s (Target: ≤ 10.000 s)
OK T_d(Delay time) : 0.105 s (Target: ≤ 5.000 s)
OK O_s(Maximum overshoot) : 0.002 (Target: ≤ 1.000 m)
OK T_s(5% settling time) : 0.534 s (Target: ≤ 20.000 s)また、実行結果のグラフ化も行えます。下図は、6秒後に北に10mまで移動させるという制御を行なった結果をグラフかしたものです。
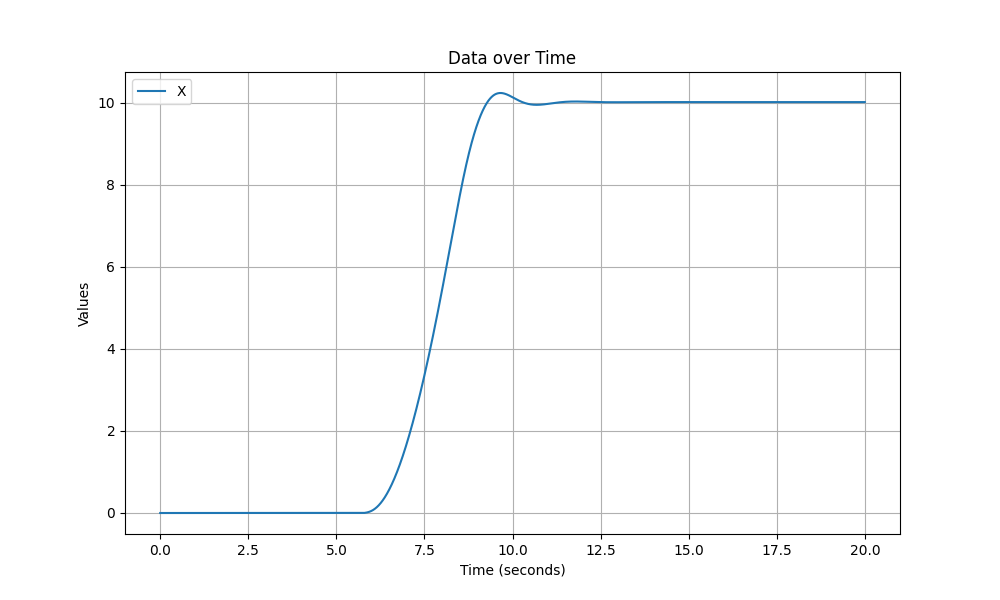
そして、先述のログリプレイ機能を使えば、その飛行挙動を簡単にビジュアライズできます。
デモ:
ツールの利用手順はこちらで公開していますので、ぜひご利用ください。
合同会社 箱庭ラボ 担当:森崇
コメントを残す