2024年6月28日に開催されたTOPPERSカンファレンス2024において、「(B)フライトコントローラ PX4 を連携可能なドローンのプラントモデル向け箱庭環境 hakoniwa-px4sim の一般公開」が第21回TOPPERS of the Yearを受賞しました(トピックス部門)。

TOPPERS of the Yearは、その年の一年間でTOPPERSプロジェクトに貢献した活動、成果物に与えられる賞です。プロジェクト正会員の投票により決定し、毎年開催されるTOPPERSカンファレンスの懇親会において表彰されます。
箱庭ドローンシミュレータは、JASAドローンWGと箱庭WGおよび箱庭ラボの合作です。
ここで、箱庭ドローンシミュレータの開発秘話を少しだけお話ししたいと思います。
箱庭ドローンシミュレータの開発秘話
それは、箱庭ラボ設立直前の出来事です。2023年7月28日、JASAドローンWG主査の牧野さんが永和システムマネジメントに来社されました。会議室で、牧野さん、平鍋さんとのディスカッションを通じて、箱庭ドローンシミュレータの基本構想が生まれました。
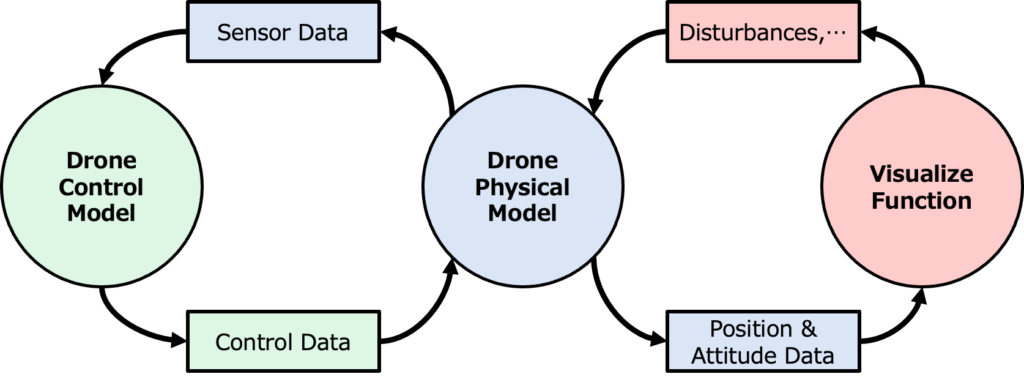
それは、「制御モデル」、「物理モデル」、「ビジュアライズ」を3つの独立した機能として捉え、箱庭がそれらを統合するというもので、以下のことを実現することを目的としました:
- 制御モデル、物理モデルは、MATLAB/SimulinkやC言語の実装を選べるようにする。
- 制御モデルはPX4やQGCと連携可能にする。
- ビジュアライズは、UnityでもUnreal Engineでも、あるいは可視化しないという選択もできるようにする。
正直、技術課題が山積みで、腰が引けたことを覚えています…。多分、ドローンの経験がない自分には到底実現するのは難しいだろうと思っていました。カバーしなければならない技術範囲が非常に広かったのです(下図参照)。
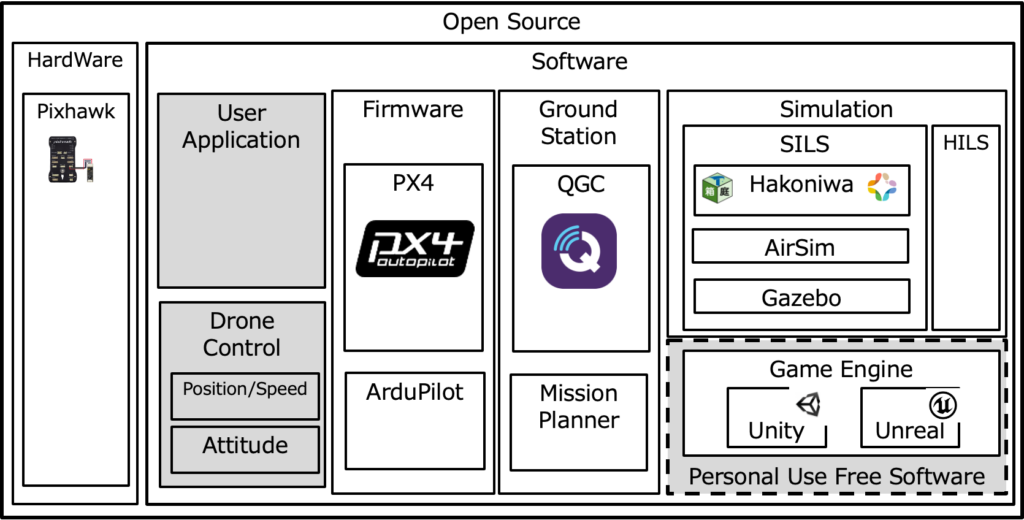
ところがです。平鍋さんが社長業の傍らで物理モデルの制作協力を買って出てくれました。自分もPX4やQGC、AirSimの調査を進め、新しい技術を吸収していく中で、2023年12月28日に 1st リリースを行うことができました。その後、大小12回のリリースを重ねて、つい先日 version 2.5.0 をリリースに至りました。
並行して、JASAドローンWGの牧野さんは、このシミュレータのビジネス的な活用先の調査やデモを率先して行ってくださり、様々な方面で好反応を得ています(他にもJASAドローンWG内で協力してくれる方がどんどん増えていますが、こちらは別の機会にお話ししたいと思います)。
最後に
箱庭ドローンシミュレータは、自分が一人で作ったものではなく、牧野さんはじめJASAドローンWGの方々および平鍋さんの協力がなければ作ることができなかったと思います。箱庭は技術者をつなげるハブにもなっていると実感しています(皆さんが面白いと思ってくれるので手が勝手に動いている気がしました)。
箱庭ラボはもうすぐ2年目に入ろうとしています。この1年で大きかったのは、このように熱い仲間がどんどん箱庭の面白さに引き込まれ、一緒に開発や広報を手伝ってくれていることが財産だと思います。
合同会社 箱庭ラボ 担当:森崇
コメントを残す