おはようございます。今日は6月30日。もう6月も終わりなんですね。早いものです。
さて、今日は、箱庭ラボがいま取り組んでいる開発重要項目の1つである箱庭の Unreal Engine 対応について、ご紹介しようと思います。
箱庭のUnreal Engine対応
1stリリースは、8月を予定しています。最初のリリースでは、Unity版の箱庭ドローンシミュレータの基本機能を移植予定です。
対応予定の内容:
- サポートOS:まずはWindowsから(Mac/Linuxは順次対応していきます)
- WebSocketベースでのPDU通信機能をプラグインとして公開
- 箱庭ドローンの位置と姿勢とプロペラ回転
- PS4コントローラでの箱庭ドローンの操作
箱庭ドローンシミュレータは、様々な機能がありますが、Unityで実装されたものもたくさんあります。一気にすべてを移植するのは骨が折れますので、ニーズが高いものから順番に対応していきたいと思っています。
現在開発中のリポジトリは、こちら:https://github.com/hakoniwalab/hakoniwa-pdu-unreal
ちなみに
実は、昨年、ゲームエンジンの柔軟性を示すために、Unreal Engine 対応版の開発を進めていたのですが、あまりニーズがないような気がしていたので、ペンディングしました…。
ただ、最近、箱庭の商用化を考えると、ライセンス面でUnreal Engineの対応も進めたほうがよさそうだなと思い、今月から対応を少しずつ進めていたのです。
現在の進捗状況
現在、こんな感じのドローンモデルができました。3Dモデルは箱庭ドローン初号機です!
このモデルは、Unity版と同じように「箱庭PDU」を通じて、外部の制御データと連携できる構成です。
そして、こんな感じで動作できています。
🧱 Unreal Engine版のアーキテクチャ概要
Unreal Engine対応のアーキテクチャは、Unityと同じように、WebSocketベースでの「Unrealによる可視化層」を追加するだけです(下図)。
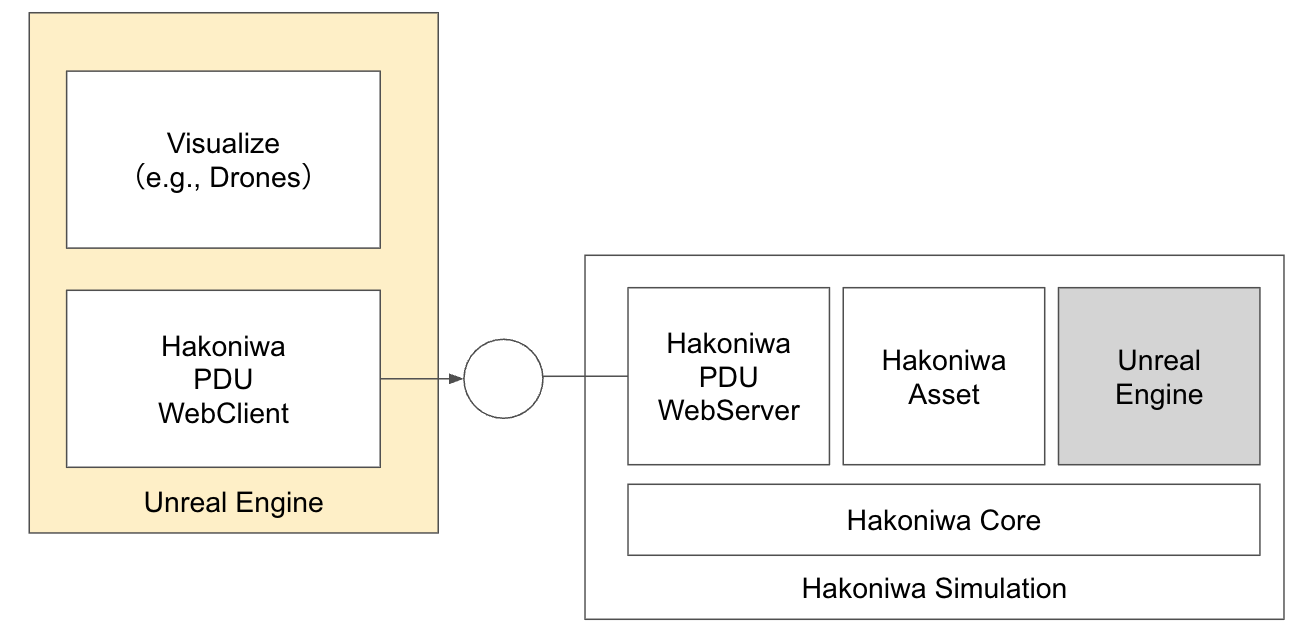
- 左側(オレンジ色の枠)が Unreal Engine 側
- ドローンの位置・姿勢・回転などを 可視化(Visualize)
- WebSocket経由で箱庭システムとデータ通信する Hakoniwa PDU WebClient を内蔵(プラグイン化します)
- 右側が 箱庭 Simulationシステム
- センサ情報や制御命令などをやり取りする中心
- Hakoniwa PDU WebServer を介して Unrealと接続
この構成により、Unreal Engine上の3Dモデルが箱庭の時刻同期・制御ループと連動して動作するようになります。
🔜 これから取り組む予定のこと(7月〜)
今後は、以下のような機能を順次実装していく予定です。
- 🎮 PS4コントローラによるドローン操作の実装
- 📡 センサデータ連携(LiDAR/カメラなど)の実装準備
- 💡 ユーザーが自由にアクターを拡張できるような仕組みも模索中
コメントを残す