今回は、少し趣向を変えまして、箱庭ラボのエンジニアが日々どんなことをしているのかを、
日記風にゆるく綴っていく「箱庭ラボ日記ブログシリーズ」を始めることにしました。
第一回目となる本日(2025年6月26日)、箱庭ラボのエンジニアが取り組んだのは、こちらの三本立て:
- 箱庭コンダクタ(Rust製)のメンテナンスとドキュメント整備
- Unity上で風の可視化調整
- Webサイトのトップページ改善
という、まさに「裏方三本立て」な一日でした。
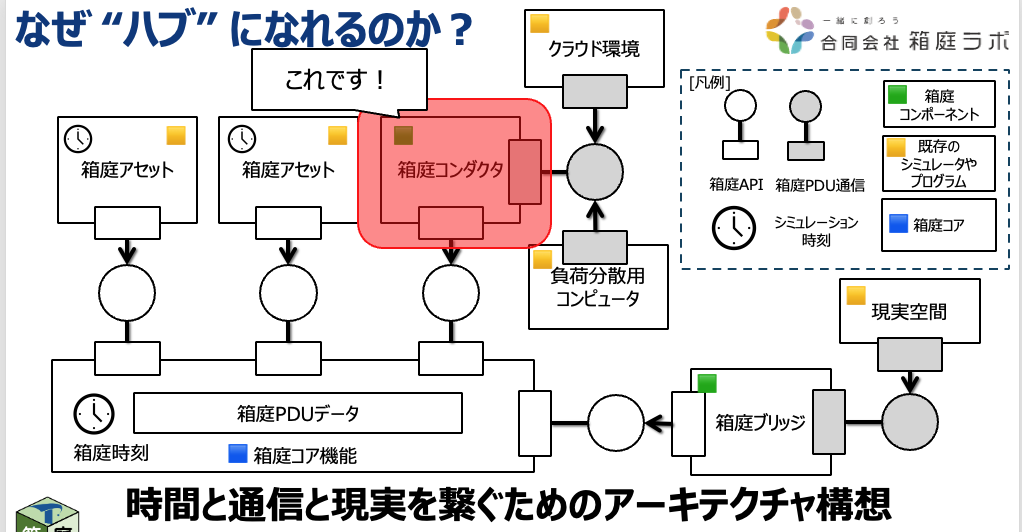
箱庭コンダクタとは?
箱庭コンダクタは、複数マシン間でシミュレーションを負荷分散しながら時刻同期できる箱庭の中核コンポーネントの一つです。
実は、箱庭ラボ設立初年度にクライアント機能のアップデートを行ったのですが、あまりにニッチすぎたため、長らくメンテが滞っておりました……(反省)。
なぜ今、メンテを?
きっかけは一昨日の TOPPERSカンファレンス2025 でした。自分の発表が終わったあと、とある方から「箱庭コンダクタ使ってみます!」とのお声がけが。
嬉しさと同時に、「いや、たぶん動かないかも…」という後ろめたさもあり、帰りの新幹線で試したら案の定ビルドエラー。そのまま一夜明け、意を決して一気に修正に着手しました。
本日のアップデート内容
- ✅ READMEを刷新し、誰でも手軽に導入・再現できるように!
- ✅ 箱庭コンダクタのコマンド仕様を明記
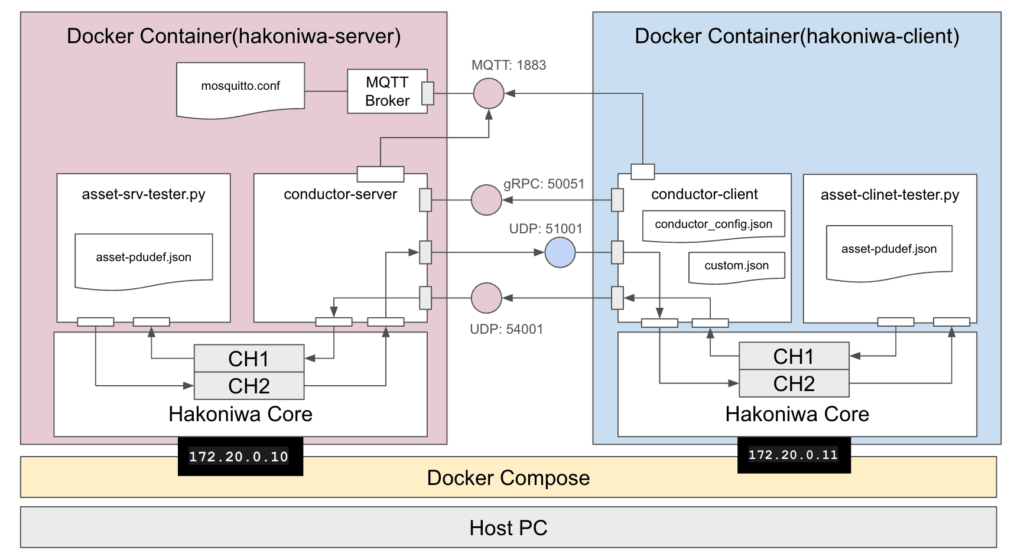
- ✅ UDP / MQTT両方のPDU通信動作を検証・確認
- ✅ Docker Composeによる統合テスト環境を再構築
- ✅ Python製の箱庭テストアプリを最新APIに対応して再作成
これがそのアーキテクチャです。
箱庭コンダクタは、クラウド/Kubernetes構成との親和性が非常に高いと信じています。今後の展開にご期待ください!
Unityで風見鶏!風の可視化への挑戦
午後からは、先週の課題だった「箱庭ドローンシミュレータでの風の可視化」に再挑戦。
試行錯誤したアイディアたち:
- ❌ Unityパーティクルで風をアニメーション → 方向が分かりづらく断念
- ❌ 透明マテリアルでエリア表示 → 吹いてるのは分かるが方向と強さが表現できずボツ
そして閃いたのが…「風見鶏」でした。
風の方向=鶏の向き、
風の強さ=下の回転体の速度。
まさにアナログの勝利。「アナログ力、恐るべし」です。
Unity上での実装もまずまずうまくいき、風の存在感がグッと増しました。
そして、これがそのUnity実装です。なんとなく風の強さや風光は直感的にわかりますよね。
箱庭ラボWebサイト トップページ改善
時間が少し余ったので、Google Analyticsでサイトアクセスを確認。ChatGPTと対話しながら分析してみた結果…
「トップページ、情報が少なくて導線も弱い」
と判明。たしかに、ラボ設立から2年が経ち、アップデートしていなかったのです。
そこで、トップページに以下のような要素を新たに追加しました:
- 8月一般公開予定のサービス紹介ページへの導線
- 箱庭・箱庭ドローンの技術紹介
- オープンソース活動の紹介リンク

🚀 3年目の箱庭ラボへ
箱庭ラボは、今年8月で3年目に突入します。
その節目の目標は、ビジネスとしての箱庭の展開。
これまでのOSS中心の活動に加えて、社会実装・教育応用・商用連携を見据えた進化を図っていきます。
今後の箱庭ラボに、ぜひご注目ください!
コメントを残す