箱庭ドローンシミュレータは、箱庭の技術を基盤にして開発されたドローンシミュレータです。無償版では、PX4/ROS2連携や基本的なセンサー対応をサポートし、誰でも使える研究用ツールとして公開されています。
👉 詳しくはこちら:hakoniwa-drone-core
箱庭ドローンシミュレータの特徴
実機テストの“高コスト・高リスク・非再現性”に悩んでいませんか?
箱庭ドローンシミュレータは、以下の6つの機能を通じて、安全・効率的なドローン開発・運用・教育環境を提供します。
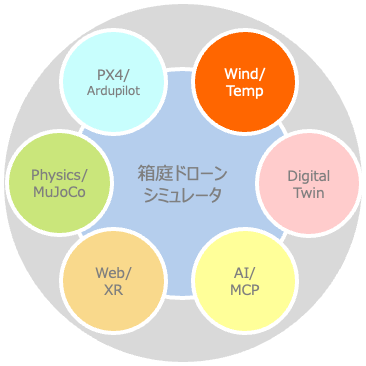
◉ PX4 / Ardupilot
– オープンソースの主要フライトコントローラ
– 実機互換の制御が可能
◉ Physics / MuJoCo
– 高精度な物理エンジンで動作を再現
– 姿勢制御・外力応答のテストに有効
◉ Wind / Temp
– 風や温度など環境パラメータを模擬
– 動作条件の再現・テストが可能
◉ Web / XR
– WebやVR/AR表示で可視化
– 遠隔操作や体験展示向けの活用も
◉ Digital Twin
– 現実空間とのリアルタイム連携
– 状態監視やサービス連携に応用
◉ AI / MCP
– AIアルゴリズム(例:経路最適化)との統合
– 群制御・自律飛行の研究基盤に
箱庭ドローンシミュレータのアーキテクチャ
箱庭ドローンシミュレータは、複数の制御系・物理エンジン・外部環境と連携しながら、リアルかつ拡張可能なドローンシミュレーションを実現する統合型プラットフォームです。
このアーキテクチャは、中央の「箱庭ドローン」を軸に、制御系(左)・物理連携(右上)・外部環境(右下)・外部通信ブリッジ(下部)が連動することで、シミュレーションと実世界・仮想世界のシームレスな接続を可能にしています。
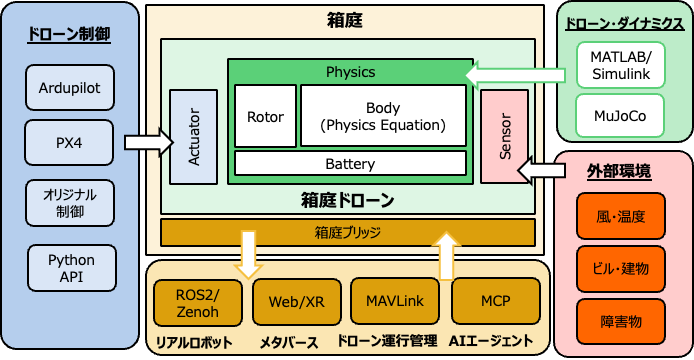
🟦 ドローン制御(左)
– ArduPilot、PX4、オリジナル制御、Python APIなど、多様な制御ソフトウェアに対応。
– 箱庭を介して、制御信号は「アクチュエータ」に渡され、物理演算へ反映。
🟩 箱庭ドローン(中央)
– Rotor / Body / Batteryなどの物理モデルを内部に保持。
– Physics層で、力学・運動方程式に基づくリアルな動作を再現。
– Sensorコンポーネントにより、環境情報や機体状態をシミュレート。
🟩 ドローン・ダイナミクス連携(右上)
– 外部の物理エンジンや数値計算ツール(MATLAB / Simulink, MuJoCo)と連携可能。
– より高精度な制御系設計や、学術的検証用途にも適応。
🟥 外部環境モデル(右下)
– 風、温度、建物、障害物などを定義し、センサや物理演算に影響を与える。
– 実環境の制約・リスクを仮想空間に反映するための重要な要素。
🟧 箱庭ブリッジ(下層)
箱庭ドローンと外部とのデータ橋渡しを担うモジュール群:
– ROS2 / Zenoh:リアルロボットや ROS 2 との連携
– Web / XR:メタバース、VR/AR表示、操作端末との接続
– MAVLink:Mission Planner 等、地上局のMAVLink通信との連携
– MCP(Model Context Protocol):AIエージェントとの連携
見て・触れて・わかる。箱庭ドローン実演集
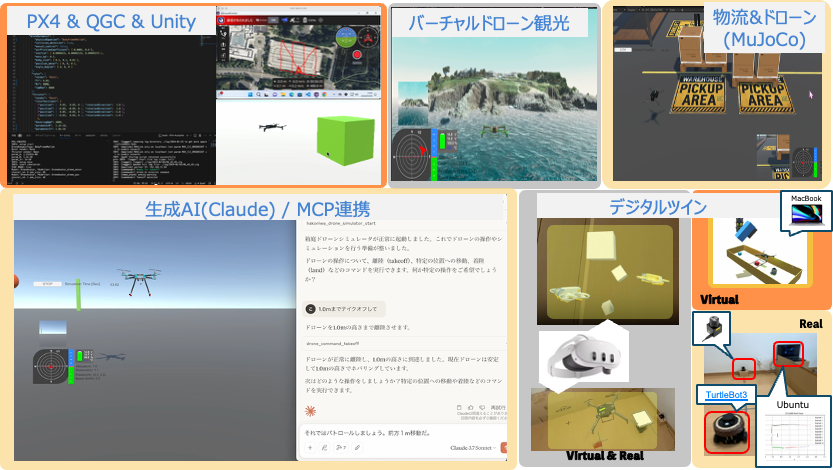
PX4 & QGC & Unity
こちらは、箱庭ドローンシミュレータをPX4とQGCを連携し、Unityでビジュアライズしたものです。
温度ドリフトによるドローン制御が不安定になるシミュレーション
機体を2台にして、センサ性能の差を比較できるようにしました。
機体1:高性能なセンサを備えた機体です。初期位置は左。
機体2:温度ドリフトによって影響を受けやすい機体です。
初期位置は中央 画面左の赤い領域:温度60度の高温領域
画面右の青い領域:温度−40度の低温領域
機体の色は、機体温度によって変化します。
低温:青
平温:緑
高温:赤
機体1は、高温領域から離陸し、低温領域を通って目的地に到達しますが、 機体2は、低温領域を通り始めると不安定になり、落ちてしまいます。
バーチャルドローン観光
こちらは、福井県の東尋坊の3DモデルをUnityに組み込み、箱庭ドローンシミュレータで飛行している様子です。こちらは、大阪・関西万博で利用されました。詳細はこちらを参照ください。
風のシミュレーション
こちらは、斜め方向に1m/secの風が来るので、ドローンが流されている様子です。
フリップ制御
こちらは、箱庭ドローンシミュレータの独自制御として、フリップ制御を組み込んだものです。
物流&ドローン(MuJoCo)
こちらは、箱庭で2つのシミュレータを統合して、Unityでビジュアライズしているものです。
– 箱庭ドローンシミュレータによるフォークリフトの監視
– MuJoCoで作成したフォークリフトのシミュレーション
デジタルツイン
こちらは、箱庭ドローンシミュレータと本物のロボット(TurtleBot3)を連携したデジタルツインのデモです。バーチャル空間で箱庭ドローンが荷物を双子のロボットに荷物を置くと、本物のロボットが動き出します。
こちらは、ROSConJP 2024 でデモ展示したもので、ARデバイス(Quest3)でビジュアライズし、荷物運搬をしている様子です。詳細は、こちらを参照ください。
AR連携
こちらは、2台のQuest3で、それぞれのドローンをあたかも同じ空間で共有できている様子です。ドローン同士を衝突させることができます。詳細はこちらを参照ください。また、大阪・関西万博のデモ展示でも利用されました。
ドローン操縦訓練
一般的な操縦訓練コースで、AR空間でのドローンの操縦訓練ができます
特徴:
- 前方に2m/secの風エリアがあります
- 床面を透明で、ドローンの影が落ちます
- 障害物にぶつかると、コントローラがバイブします
- 前方カメラ映像をスティック左にあります
- カメラのチルト動作が可能です
- ドローンの移動軌跡が見えます
生成AI(Claude)/MCP連携
こちらは、箱庭ドローンシミュレータをMCPサーバーで連携し、Claudeから操作している様子です。詳細はこちらを参照ください。
お台場でドローン飛行
おまけ。お台場の3Dモデルを組み込んで、箱庭ドローンシミュレータで飛行している様子です。詳細はこちらを参照ください。