箱庭ラボのオープンソース活動実績
学会発表
- 第24回計測自動制御学会システムインテグレーション部門講演会(SI2023)
- 箱庭技術への mROS 2 通信機能の統合によるリアルとバーチャルの融合体験を実現するシステムアーキテクチャの検討
- ロボティクス・メカトロニクス 講演会 2024
- 箱庭技術を活用した PX4 向けドローンシミュレータの検討
- 日本ロボット学会 2025
- Zenoh通信基盤を活用した現実空間と仮想空間を繋ぐ箱庭ブリッジの設計およびその実証事例
- ロボティクスシンポジア 2025
- 分散シミュレーションハブ「箱庭」における時刻同期機能の実現
記事
- Interface 連載:分散シミュレーション環境 箱庭 第1〜2回
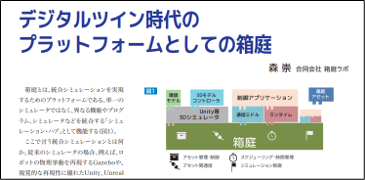
- JASA機関誌 :デジタルツイン時代のプラットフォームとしての箱庭
出典:JASA機関誌 Vol.093,2025
https://www.jasa.or.jp/dl/bj/bj093/bj93_special.pdf
講演
- 第5回 AI/IoTシステム安全性シンポジウム
- EdgeTech+WEST 2024
- ROSCon JP 2024
受賞
- TOPPERS of the Year
- 2023:箱庭上で ROS 2 プログラムを手軽にシミュレーションできるhakoniwa-ros2simの一般公開
- 2024:フライトコントローラ PX4 を連携可能なドローンのプラントモデル向け箱庭環境 hakoniwa-px4sim の一般公開
- 2025:シミュレーションハブ技術の研究開発、『Interface』誌での連載、ROSCon JP、ロボット学会等での展示・発表、「箱庭まつり」などconnpassイベントによる継続的な情報発信